Hello!
I have tested several WSM examples with Arduino. So I got an example on Wolfram Blog : http://blog.wolfram.com/2014/11/07/using-arduinos-as-systemmodeler-components/
It seems helpful to me. So I tested it on my PC. But I got an error like the below screenshot. 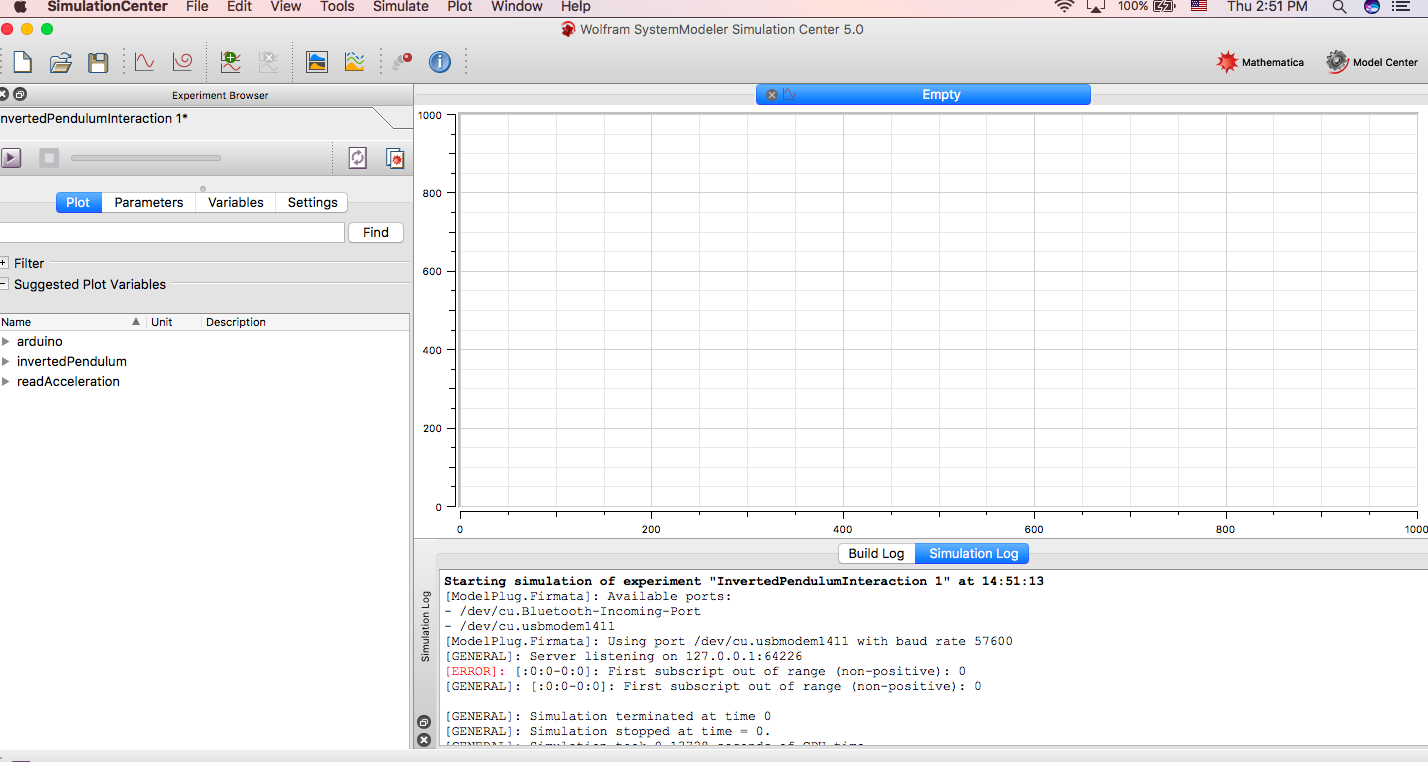
But I have already checked all settings. I got the information of Arduino port. And I also tested the Arduino example. 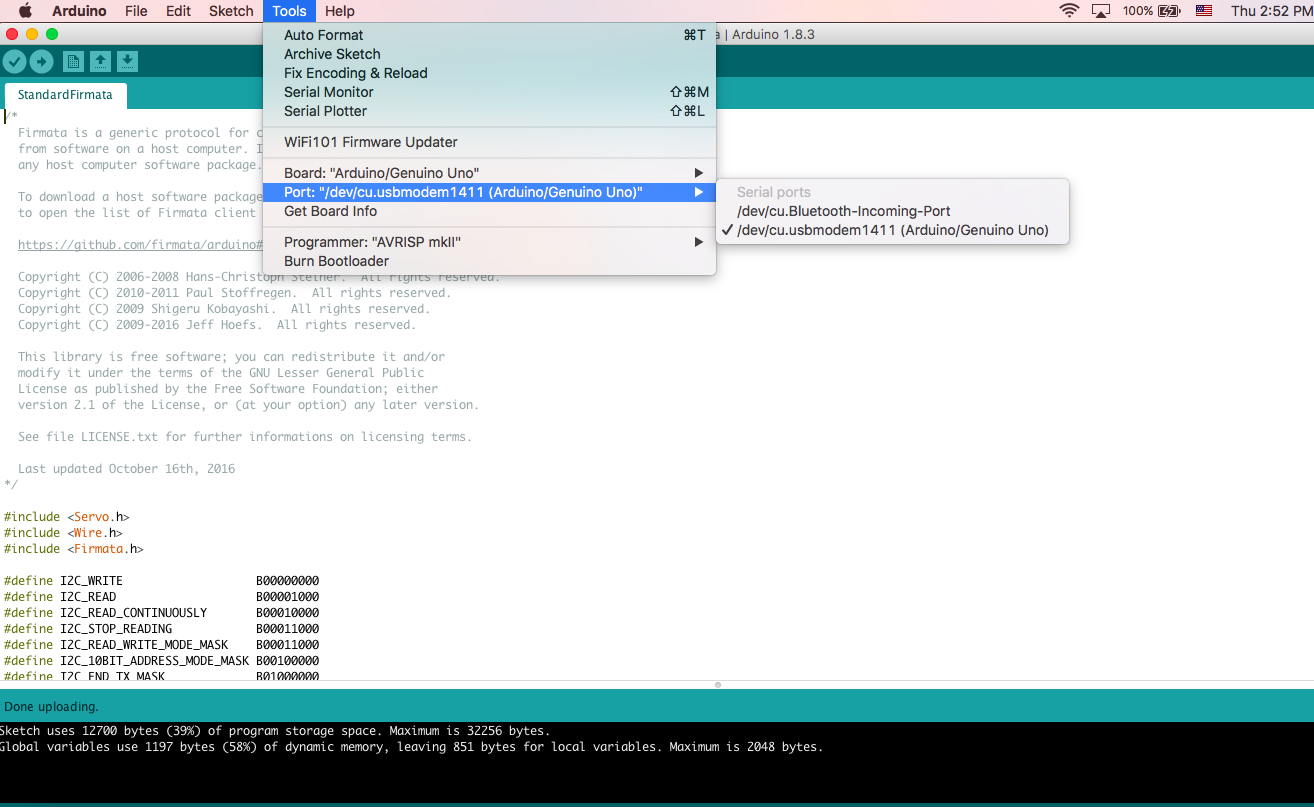
So I set the port correctly. 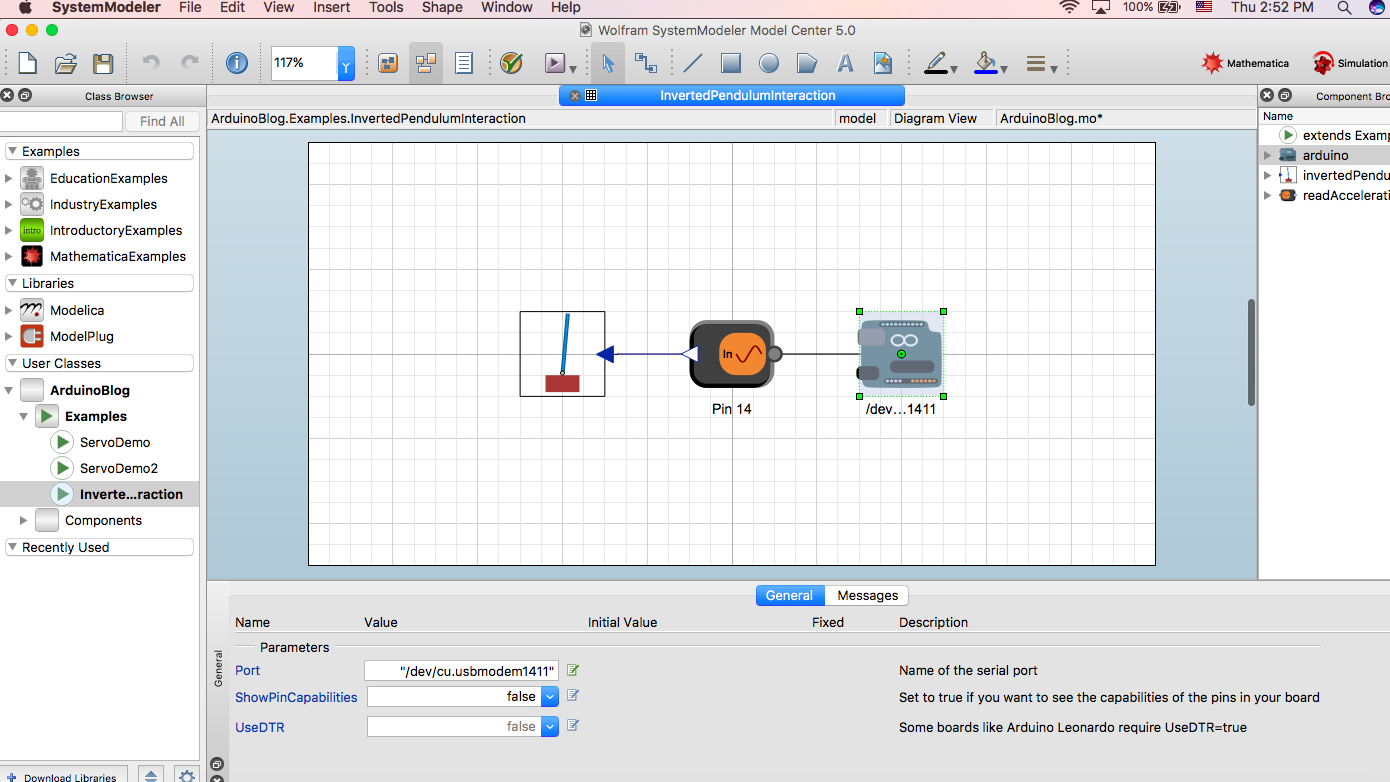
My friend said that it runs well on previous version. But I do not want to downgrade to previous version!
I asked to WRI TS team but they suggested me to check the C++ compiler....I used WSM since version 2.1. Of course, I checked the compiler. 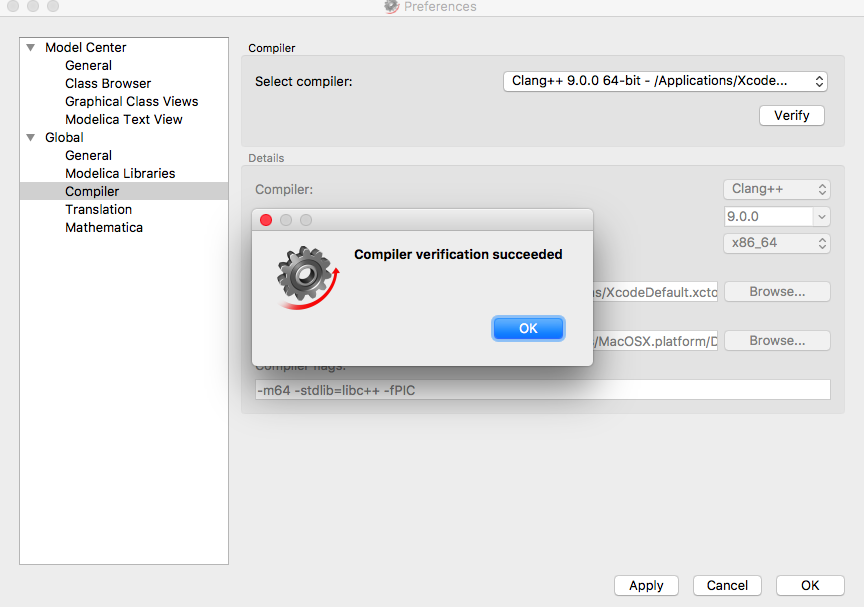
Please let me know any solution.
My WSM version is 5.0 and Mathematica version is 11.2. And my machine is MacOS Sierra 10.12.6 ( MacAir 2014 Version).
The test file is located the blog page.


