John,
You should also consider using Wolfram SystemModeler (WSM). WSM makes it much easier to get the results and animation. You can even run WSM from within Mathematica.
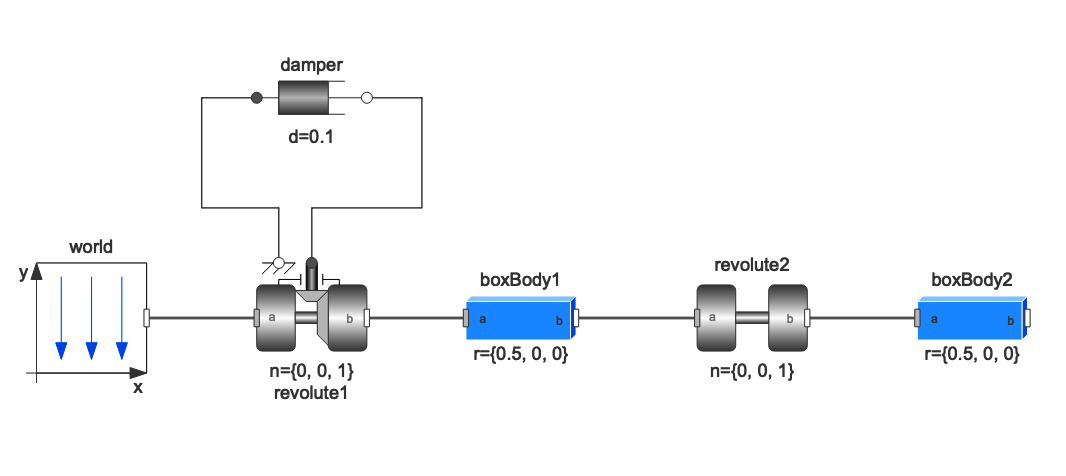
For example, open either the example "Modelica.Mechanics.MultiBody.Examples.Elementary.DoublePendulum" or "Modelica.Mechanics.MultiBody.Examples.Elementary.DoublePendulumInitTip"
they look like this:
The animation looks like this (and it can be customized and run at various speeds):
You can run it in WSM or simulate it in Mathematica:
model = SystemModel["Modelica.Mechanics.MultiBody.Examples.Elementary.DoublePendulum"]
sim = SystemModelSimulate[model]
Lastly, you can even get the equations of motion in Mathematica with some simplification and elimination of extraneous variables.
For a problem like this, WSM is far faster than Mathematica (unless you are trying to learn the equation approach). WSM also eliminates the common problem with Lagrangian approaches in which an error results in non-conservative or incorrect equations.
I hope this helps.
Regards,
Neil


