You can explicitly see that the closed-loop system has 2 unstable poles
In[25]:= csys = SystemsModelFeedbackConnect@tf;
TransferFunctionPoles[csys][[1, 1]] // N
Out[26]= {-4.47411, 1.23705 - 3.2464 I, 1.23705 + 3.2464 I}
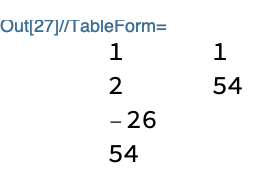
Or use the Routh–Hurwitz criterion which shows two sign changes in the first column.
In[27]:= Control`StabilityArray[csys][[1, 1]] // TableForm