Lucien,
Again, the modeling depends on what you are trying to capture with the model. For example, I grabbed a picture of a single scissors mechanism from this technical paper:
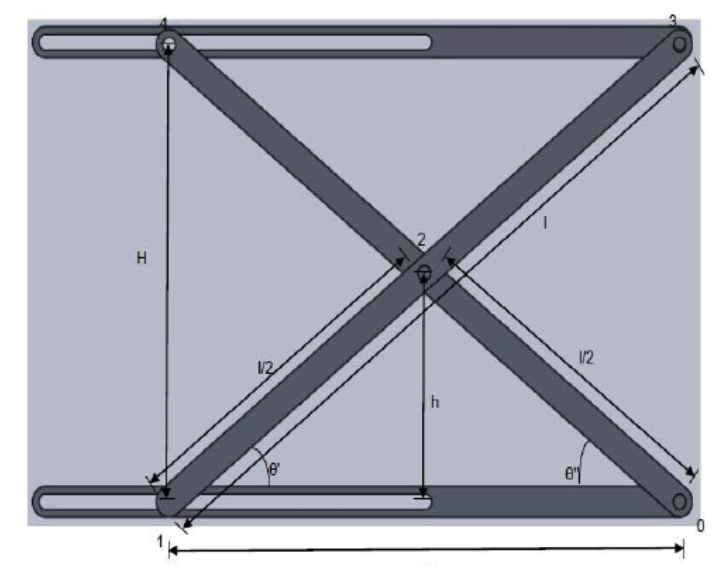
If your input is the distance, h, then the mechanism is a simple, linear transmission with a 1:2 gear ratio between input, h and output, H. This is easily modeled with two IdealGearR2T blocks -- one with a 1:1 ratio to move from translation to rotation with no ratio and a second one to go from rotation back to translation with a 1:2 ratio (output is twice the input). The two blocks together form a linear transmission (I do not believe there is a single linear to linear gear block built into WSM). You can then add springs, masses, and input sources to provide the forces to move the mechanism.
If, however, your input is S, the mechanism is highly nonlinear because (using the Pythagorean theorem for triangles)
H == Sqrt[l^2-S^2]
In this situation you would have to write your own block to translate the motion in S to motion in H using the expression above and its derivatives (see the der() function in modelica). To construct a two port modelica translation block you need an equation for position and an equation for force. (use a simple translation block such as "spring" as a starting example). If your input is S, the relationship between the position and the force is not linear.
Regards,
Neil


