Hi, I have this model: 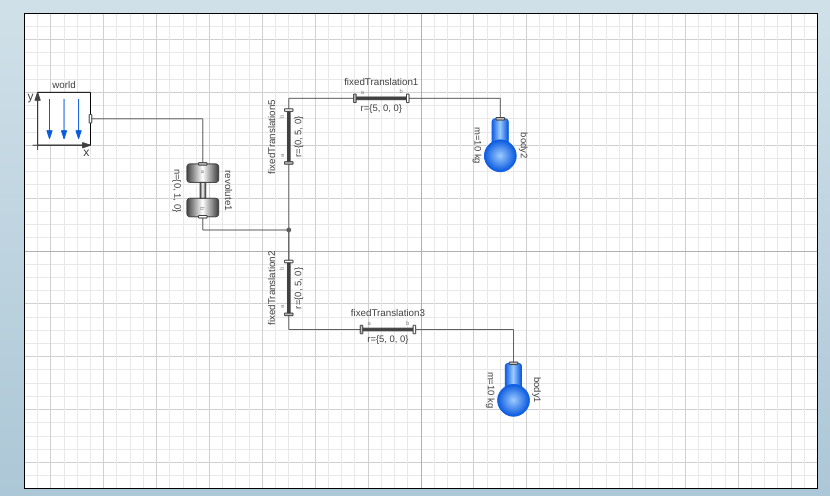
When I play it runs perfectly, here is a screenshot of the animation: 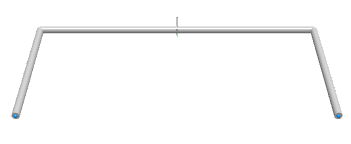
As expected, the model behaves like a pendulum connected by bars. However, I would like to model with a fourth bar, something lke this: 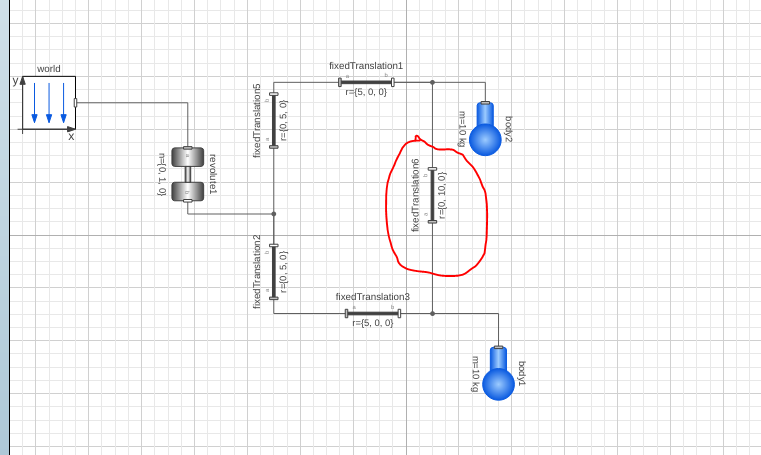
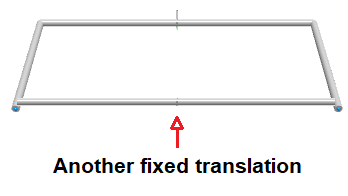
The animation would something like this:
This results in a kinematic loop ( I guess it is the right term...). When I try to simulate it, I get this error:
The following equations are redundant: body2.framea.r0[1] = body1.framea.r0[1] + 10.0 * revolute1.R_rel.T[2,1] body2.framea.r0[2] = body1.framea.r0[2] + 10.0 * revolute1.R_rel.T[2,2] body2.framea.r0[3] = body1.framea.r0[3] + 10.0 * revolute1.R_rel.T[2,3] Corresponding variables with arbitrary value: fixedTranslation6.frameb.f[1], fixedTranslation5.frameb.t[2], fixedTranslation5.frame_a.t[1] Message for fixedTranslation6.frame_b.f[1]: All Forces cannot be uniquely calculated. The reason could be that the mechanism contains a planar loop or that joints constrain the same motion. For planar loops, use for one revolute joint per loop the joint Joints.RevolutePlanarLoopConstraint instead of
Joints.Revolute.
I tried variations of this model, but I noticed that as far as I have the fourth bar (the one that closes the loop) I will have a problem to simulate. I think I understood the problem, I may sound dumb now, but what I have to do to model with the fourth bar? Is there a way to solve it?
The model follow attached to the post.
My SM short information:
Product version: 13.1.0.3 Client: Model Center Client version: 13.1.0.4 Client creation date: 2022-05-20T15:21:04.469569 Client build revisions: J:a111bde51, L:cc04976b1, S:dd80ee46c Client build type: 64 bit Kernel version: 13.1.0.4 Kernel creation date: 2022-05-18T09:41:31.112079 Kernel build revisions: J:a111bde51, L:cc04976b1, S:1d9b31919 Kernel root directory: /usr/local/Wolfram/SystemModeler/13.1 Installation directory: /usr/local/Wolfram/SystemModeler/13.1 Platform: Linux Mint 20.2
 Attachments:
Attachments:


