Hi, the general problem you are encountering is that it is not allowed to construct over-constrained equation systems. Connecting a fixed translation between two points that already have a fixed translational relation is an example of creating an over-constrained equation system. You can easily avoid the problem by breaking one of the connections where it is already known that the connected frames will coincide:
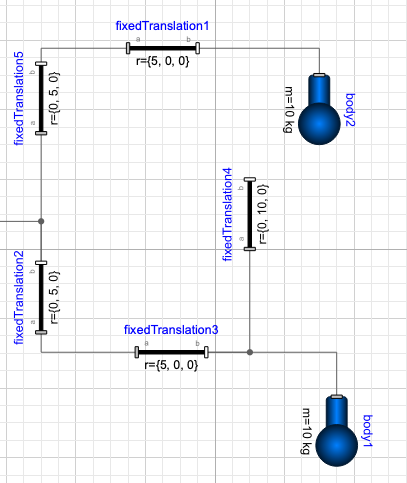
I hope that you are aware that adding this FixedTranslation component will not have any impact on simulation dynamics, even though it is visible in the animation. To actually have an impact on dynamics, one has to use a component with inertia, for example BodyCylinder that combines a FixedTranslation with a Body.


