Hi, Sorry for the beginner's doubt, but why the system below doesn't work? 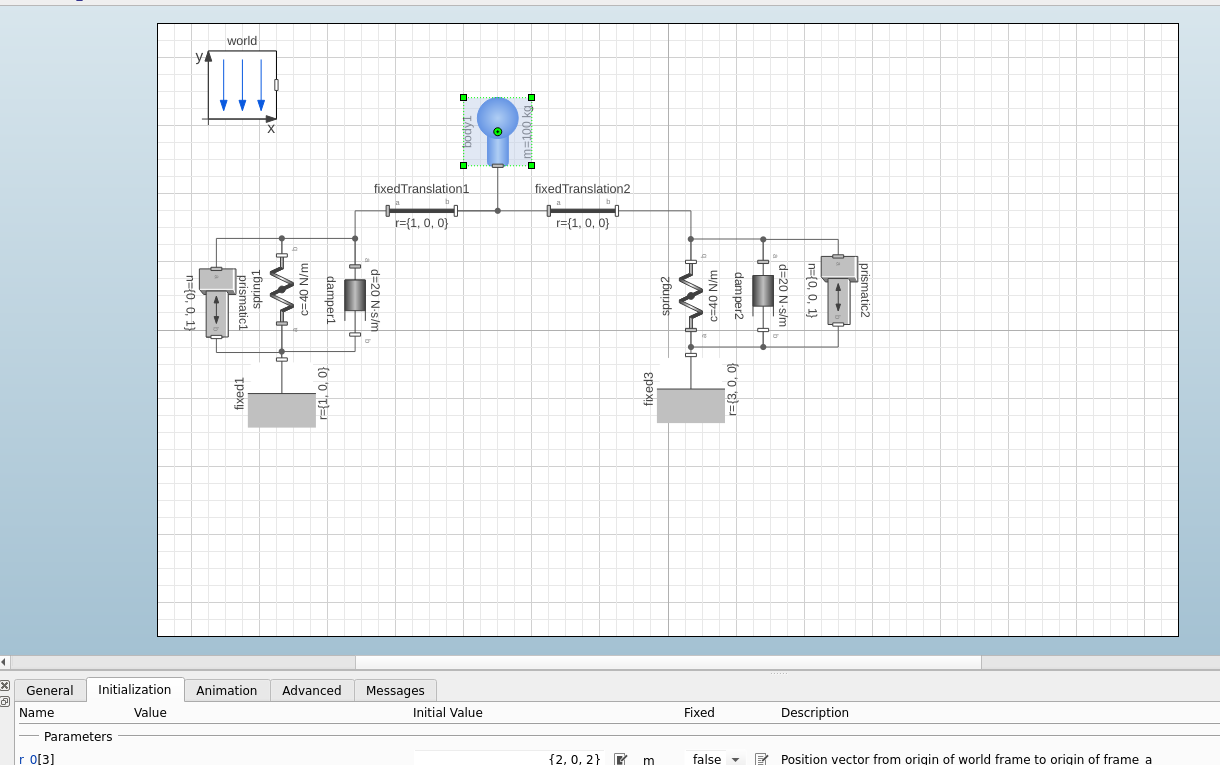
When I try to run, it returns an error:
Error: Equation without any variables revealed after application of replacements:
0.0 = 0.0 Equation before replacements:
0.0 = atan2(spring1.lineForce.lineShape.widthDirection[2] * spring2.lineForce.lineShape.widthDirection[3] - spring1.lineForce.lineShape.widthDirection[3] * spring2.lineForce.lineShape.widthDirection[2], 1.0) Replacements:
spring2.lineForce.lineShape.widthDirection[3] -> 0.0
spring2.lineForce.lineShape.widthDirection[2] -> 1.0
spring1.lineForce.lineShape.widthDirection[3] -> 0.0
spring1.lineForce.lineShape.widthDirection[2] -> 1.0 Error: Equation without any variables revealed after application of replacements:
0.0 = 0.0 Equation before replacements:
0.0 = 1.5707963267949 * (1.0 - sign(spring1.lineForce.lineShape.widthDirection[3] * spring2.lineForce.lineShape.widthDirection[3] + spring1.lineForce.lineShape.widthDirection[1] * spring2.lineForce.lineShape.widthDirection[1] + spring1.lineForce.lineShape.widthDirection[2] * spring2.lineForce.lineShape.widthDirection[2])) Replacements:
spring2.lineForce.lineShape.widthDirection[3] -> 0.0
spring2.lineForce.lineShape.widthDirection[2] -> 1.0
spring2.lineForce.lineShape.widthDirection[1] -> 0.0
spring1.lineForce.lineShape.widthDirection[3] -> 0.0
spring1.lineForce.lineShape.widthDirection[2] -> 1.0
spring1.lineForce.lineShape.widthDirection[1] -> 0.0 Error: Equation without any variables revealed after application of replacements:
0.0 = 0.0 Equation before replacements:
0.0 = atan2(spring1.lineForce.lineShape.widthDirection[1], 1.0) Replacements:
spring1.lineForce.lineShape.widthDirection[1] -> 0.0
But when I try the following system with one fixed point, it works: 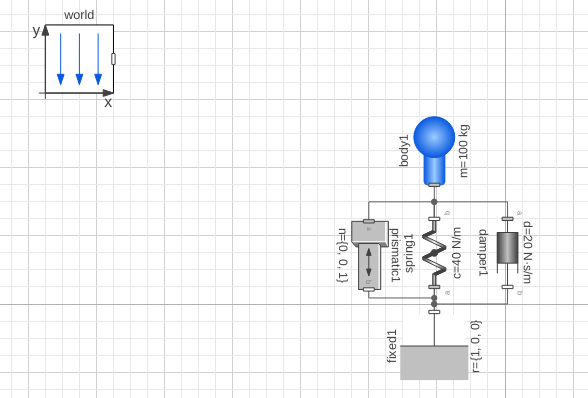
I tried to initialize the body properly in each system, but just the second one works. I know that there is some constraint issue but I can't see clearly why it doesn't work. I can imagine the system working mechanically but bringing it to multibody approach in modelica it still hard for me.
Follow attached both models.
OBS: Gravity vector is {0,0,-1}.
 Attachments:
Attachments:


