Streaming Live Phone Sensor Data to the Wolfram Language
(This forms Part 1 of a 2-part community post: "Using Machine Learning Models for Accelerometer-based Gesture Recognition" - part 2 is available at http://community.wolfram.com/groups/-/m/t/1386392)
Not only are smartphones wonderful ways to stay connected to the digital world, they also contain an astonishing array of sensors making them ideal for scientific and computational experimentation.
The Wolfram Language (WL) has extraordinary data processing and scientific computing abilities - the only sensors, however, from which they can read data are specialised and either somewhat expensive or require a significant amount of setup. On a high level, the WL has baked-in support for a variety of devices - specifically the Raspberry Pi, Vernier Go!Link compatible sensors, Arduino microcontrollers, webcams and devices using the RS-232 or RS-422 serial protocol (http://reference.wolfram.com/language/guide/UsingConnectedDevices.html); unfortunately, there is no easy way to access sensor data from Android or iOS mobile devices.
In this post, I will attempt to combine the two, demonstrating
A UDP socket-based method for transmission of (general) sensor data from an Android phone to the Wolfram Language (based on this excellent community post: http://community.wolfram.com/groups/-/m/t/344278 which does the same for iPhones)
A web-based, platform-agnostic method for transmission of IMU / inertial motion unit data (i.e. accelerometer and gyroscope data) from a phone to the Wolfram Language.
Socket Transmission
On the Google Play Store, there exist a number of Android apps which can transmit live sensor data to a computer over UDP sockets - for instance, "Sensorstream IMU+GPS" (https://play.google.com/store/apps/details?id=de.lorenz_fenster.sensorstreamgps). Unfortunately, the WL does not support receipt and transmission of data over UDP sockets - while there exists a Socket library, as of 2018 this is only capable of dealing with TCP. Thus, to use UDP sockets in the WL, we must implement our own library using JLink to access Java socket packages from the WL. (Credit is due to http://community.wolfram.com/groups/-/m/t/344278 - the code here was slightly outdated so had to be modified.)
Instructions
To send accelerometer (or other sensor) data from your phone to Wolfram over UDP sockets:
Install the "Sensorstream IMU+GPS" app
Ensure the sensors you want to stream to Wolfram are ticked on the 'Toggle Sensors' page. (If you want to stream other sensors besides 'Accelerometer', 'Gyroscope' and 'Magnetic Field', ensure the 'Include User-Checked Sensor Data in Stream' box is ticked. Beware, though - the more sensors are ticked, the more latency the sensor stream will have.)
On the "Preferences" tab:
a. Change the target IP address in the app to the IP address of your computer (ensure your computer and phone are connected to the same local network)
b. Set the target port to 5555
c. Set the sensor update frequency to 'Fastest'
d. Select the 'UDP stream' radio box
e. Tick 'Run in background'
Switch stream ON before executing code. (nb. ensure your phone does not fall asleep during streaming - perhaps use the 'Caffeinate' app (https://play.google.com/store/apps/details?id=xyz.omnicron.caffeinate&hl=en_US) to ensure this.)
Execute the following WL code (in part from http://community.wolfram.com/groups/-/m/t/344278):
Initialise JLink
QuitJava[];
Needs["JLink`"];
InstallJava[];
Initialise a socket connection - ensure 5555 is the target port set
udpSocket=JavaNew["java.net.DatagramSocket",5555];
Function that reads size bytes of a function.
readSocket[sock_,size_]:=JavaBlock@Block[{datagramPacket=JavaNew["java.net.DatagramPacket",Table[0,size],size]},sock@receive[datagramPacket];
datagramPacket@getData[]]
Function that reads from the socket, processes data and 'sows' it to be collected later
listen[]:=record=DeleteCases[readSocket[udpSocket,1200],0]//FromCharacterCode//Sow;
Initialises the results list and repeatedly appends accelerometer data to it every 0.01 seconds - if the list is over 700 elements long, the 150 oldest elements (at start of list) are removed.
results={};RunScheduledTask[AppendTo[results,Quiet[Reap[listen[]]]];If[Length[results]>700,Drop[results,150]],0.01];
Initialises the stream list to be refreshed every 0.01 seconds with the most recent 500 elements of results. Each element of results is a string of transmitted socket data (e.g. "225585.00455, 3, -1.591, 8.624, 5.106, 4, -0.193, -0.690, -0.072") - this is split into a list of strings {"225585.00455", "3", "-1.591"...} and each string is converted to a numerical expression.
stream:=Refresh[ToExpression[StringSplit[#[[1]],","]]& /@ Select[results[[-500;;]],Head[#]==List&],UpdateInterval-> 0.01]
Stream now contains the 500 most recent accelerometer readings, stored in an array. The values of Stream will be updated whenever the variable is used within a Dynamic. (Note that, with the default sensors enabled - the first three boxes ticked on the Toggle Sensors tab - the x, y and z coordinates of the accelerometer can be accessed at elements 3, 4 and 5 in each list in the array. (e.g. to access the most recent accelerometer reading, run stream[[-1,3;;5]])
The accelerometer data can then be visualised using a ListLinePlot:
While[Length[results]<500,Pause[2]];Dynamic[Refresh[ListLinePlot[{stream[[All,3]],stream[[All,4]],stream[[All,5]]},PlotRange->All],UpdateInterval->0.1]]
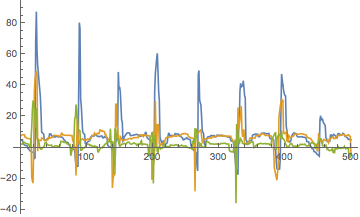
The 'pulses' (i.e. shaking the phone) were carried out every second; from this it is evident that the frequency of data transmission is 50 Hz (i.e. data is sent every 0.02 seconds).
To get the most recent accelerometer data, run
Dynamic[stream[[-1,3;;5]]]
To end socket transmission, turn off the stream on the app, run
RemoveScheduledTask[ScheduledTasks[]];
udpSocket@close[];
QuitJava[];
and ensure the process 'JLink' is quit in Task Manager / Activity Monitor etc - if it is not closed properly, you will be unable to create another socket from that port.
Channel Transmission
An alternative way to send data from a phone to the Wolfram Cloud is by using the Channel framework. Introduced in version 11 of the Wolfram Language. the Channel framework allows asynchronous communication between Wolfram sessions as well as external systems, with communication being brokered in the Wolfram Cloud. A key point to note about the Channel framework is that it is based on a publish-subscribe model, allowing messages to be sent and received through a 'channel' rather than pairing specific senders and receivers.
Instructions
To transmit accelerometer data, run the following code: (for other sensors, see the bottom of the page)
ChannelDeploySensorPage[func_]:=Module[{listener,listenerurl,SensorHTML,c,url,u},
CloudConnect[];
listener=ChannelListen["Sensors",func[#Message]&,Permissions->"Public"];
listenerurl = listener["URL"];
SensorHTML="<!DOCTYPE html><html lang=en><meta charset=UTF-8><title>Sensors</title><script src=https://cdn.jsdelivr.net/npm/gyronorm@2.0.6/dist/gyronorm.complete.min.js></script><script>function makeXHR(n,t,o){var e=Date.now(),r=(Math.random(),new XMLHttpRequest);r.withCredentials=!0;var i=\""<>listenerurl<>"?operation=send&time=\"+e.toString()+\"&x=\"+n.toString()+\"&y=\"+t.toString()+\"&z=\"+o.toString();r.open(\"GET\",i,!0),r.send()}function init(){var n={frequency:100,gravityNormalized:!0,orientationBase:GyroNorm.WORLD,decimalCount:2,logger:null,screenAdjusted:!1},t=new GyroNorm;t.init(n).then(function(){t.start(function(n){makeXHR(n.dm.x,n.dm.y,n.dm.z)})})}window.onload=init</script>";
c = CloudExport[SensorHTML,"HTML",Permissions->"Public"];
u=URLShorten[c[[1]]];
Return[{u,BarcodeImage[u,"QR"],listener}]
]
Then run
c = ChannelDeploySensorPage[Func]

(where the argument func is some function to be called whenever the channel receives a new point of data from the phone - the argument given to func is an association such as the one below:)
<|x=3, y=4, z=1|>
Now, simply scan the QR code generated with your phone, and sensor data will be streamed from your phone to the computer. The data transmitted can be viewed as a time series as follows:
c[[3]]["TimeSeries"]
The accelerometer data can also be plotted with the following Dynamic: (red --> x, green --> y, blue --> z):
Dynamic[ListLinePlot[ToExpression/@Reverse[Take[Reverse[#["Values"]],UpTo[100]]]&/@c[[3]]["TimeSeries"][[2;;4]],PlotRange->{All,{-50,50}},PlotStyle->{Red, Green, Blue}]]
When you're done, delete the channel by running
RemoveChannelListener[c[[3]]]
Explanation
Setting up a channel is as easy as connecting to the Wolfram Cloud
CloudConnect[];
and typing
current="";
Func[x_]:=current=x;
listener=ChannelListen["NameOfChannel",Func[#Message]&, Permissions->"Public"]

Here, Func is a function that will be called each time the channel receives a message (the message is supplied as an argument to the function) - it simply sets the variable 'current' to the data last sent to the channel (in the form of key-value pairs - e.g. <|x=3, y=4, z=1|>. To make the channel accessible to other users, ensure the channel has Permissions set to Public.
To delete the channel (useful when debugging), call
RemoveChannelListener[listener];
One particularly useful feature of the Channel is that it has built-in support for receiving and parsing HTTP requests - simply send a GET request to the channel URL (given by listener["URL"]) and the WL will automatically parse the parameters and make the data available to the user:
For instance, if we send an HTTP GET request to https://channelbroker.wolframcloud.com/users/<your Wolfram Cloud email address>/NameOfChannel and append the parameters "operation=send" (indicates data is being sent to the channel) and "test=5":
BaseURL=listener["URL"]
Params = "?operation=send&test=5";
URLRead[HTTPRequest[BaseURL<>Params,<|Method->"Get"|>]]
The variable 'current' has now been updated and contains the key-value pair 'test->5' which we just sent to the channel.
current
<|"test" -> "5"|>
current[["test"]]
5
An alternative way of viewing the data from the channel is to call
listener["TimeSeries"]
This allows the data sent to the channel to be stored as a time series, which can be useful in applications such as collecting time-based sensor data.
Transmission of Sensor Data over Channels
As demonstrated earlier, a nice feature of Channels is that data can be sent to the Wolfram Language over HTTP - instead of fiddling with JLink and sockets (which tend to be laggy and break easily), one can simply create a web page that streams sensor data to a channel.
For Android devices (running Google Chrome), there exist a range of built-in sensor APIs giving a web page access to raw accelerometer, gyroscope, light sensor and magnetometer data, and processed linear acceleration (i.e. total acceleration experienced by a device disregarding that produced by gravity), absolute orientation and relative orientation sensors. Documentation for these sensors exists online at https://developers.google.com/web/updates/2017/09/sensors-for-the-web.
Unfortunately, for iOS devices there does not exist an easy way to access sensors from the web - although one can use DeviceMotion events (https://developers.google.com/web/fundamentals/native-hardware/device-orientation/), the data these give can vary significantly from browser to browser (e.g. different browsers might use different coordinate systems), so training a machine learning model on gesture data produced by this method would require either retraining a model for each browser or significant processing of data based on browser.
However, there is another solution - namely, the gyronorm.js API (https://github.com/dorukeker/gyronorm.js), which claims to return 'consistent [gyroscope and accelerometer] values across different devices'. Using this, we construct a simple web page to transmit accelerometer data to a Wolfram Language channel called 'Sensors': (While the following code focuses on extracting accelerometer data, it is a trivial task to change the sensor being polled to read, for instance, gyroscope data in the Wolfram Language instead.)
<!DOCTYPE html>
<html lang=en>
<meta charset=UTF-8>
<title>Sensors</title>
<script src=https://cdn.jsdelivr.net/npm/gyronorm@2.0.6/dist/gyronorm.complete.min.js></script>
<script>
function makeXHR(x,y,z){
var t=Date.now();
r=new XMLHttpRequest;
r.withCredentials=true;
var i="https://channelbroker.wolframcloud.com/users/euan.l.y.ong@gmail.com/Sensors?operation=send&time="+t.toString()+"&x="+x.toString()+"&y="+y.toString()+"&z="+z.toString();
r.open("GET",i,!0);
r.send()
}
function init(){
//Explanations are from the GyroNorm GitHub page. (https://github.com/dorukeker/gyronorm.js/)
var n={
frequency:100, //send values every 100 milliseconds
gravityNormalized:!0, // Whether or not to normalise gravity-related values
orientationBase:GyroNorm.WORLD, // ( Can be Gyronorm.GAME or GyroNorm.WORLD. gn.GAME returns orientation values with respect to the head direction of the device. gn.WORLD returns the orientation values with respect to the actual north direction of the world. )
decimalCount:2, // How many digits after the decimal point to return for each value
logger:null,
screenAdjusted:!1
};
t=new GyroNorm;
t.init(n).then(function(){
t.start(function(data){
makeXHR(data.dm.x,data.dm.y,data.dm.z)
//Other possible values to substitute for data.dm.x, data.dm.y, data.dm.z are:
// data.do.alpha ( deviceorientation event alpha value )
// data.do.beta ( deviceorientation event beta value )
// data.do.gamma ( deviceorientation event gamma value )
// data.do.absolute ( deviceorientation event absolute value )
// data.dm.x ( devicemotion event acceleration x value )
// data.dm.y ( devicemotion event acceleration y value )
// data.dm.z ( devicemotion event acceleration z value )
// data.dm.gx ( devicemotion event accelerationIncludingGravity x value )
// data.dm.gy ( devicemotion event accelerationIncludingGravity y value )
// data.dm.gz ( devicemotion event accelerationIncludingGravity z value )
// data.dm.alpha ( devicemotion event rotationRate alpha value )
// data.dm.beta ( devicemotion event rotationRate beta value )
// data.dm.gamma ( devicemotion event rotationRate gamma value )
})
})
}
window.onload=init;
</script>
</html>
This webpage, when opened on an Android or iOS phone, will stream data to the 'Sensors' channel, sending a new HTTP request every 100 milliseconds. (Decreasing the 'frequency' leads to more frequent results, but can cause atrocious levels of lag.)
Producing the ChannelDeploySensorPage function
Although this webpage allows accelerometer data to be transmitted from a phone to a computer, for it to be used it must be deployed on a server. To change, for instance, the channel name, one would need to edit the file on the server itself, which can quickly become a tiresome process. Thus, we developed a function which autogenerates the required HTML code and stores it in the Wolfram Cloud as a CloudObject where it can easily be accessed. The function also outputs a QR code, to allow mobile users to quickly navigate to the web page. (The argument func is simply the function to be called whenever the channel receives a new point of data from the phone.)
Alternative Sensors
ChannelDeploySensorPage functions for accessing sensors other than the accelerometer can be found below: (For more information about sensors and readings, check out https://developers.google.com/web/fundamentals/native-hardware/device-orientation/)
Device Orientation (alpha, beta, gamma, absolute):
ChannelDeploySensorPageDeviceOrientation[func_]:=Module[{listener,listenerurl,SensorHTML,c,url,u},
CloudConnect[];
listener=ChannelListen["Sensors",func[#Message]&,Permissions->"Public"];
listenerurl = listener["URL"];
SensorHTML="<!DOCTYPE html><html lang=en><meta charset=UTF-8><title>Sensors</title><script src=https://cdn.jsdelivr.net/npm/gyronorm@2.0.6/dist/gyronorm.complete.min.js></script><script>function makeXHR(n,t,o,abs){var e=Date.now(),r=(Math.random(),new XMLHttpRequest);r.withCredentials=!0;var i=\""<>listenerurl<>"?operation=send&time=\"+e.toString()+\"&alpha=\"+n.toString()+\"&beta=\"+t.toString()+\"&gamma=\"+o.toString()+\"&absolute=\"+abs.toString();r.open(\"GET\",i,!0),r.send()}function init(){var n={frequency:100,gravityNormalized:!0,orientationBase:GyroNorm.WORLD,decimalCount:2,logger:null,screenAdjusted:!1},t=new GyroNorm;t.init(n).then(function(){t.start(function(n){makeXHR(n.do.alpha,n.do.beta,n.do.gamma,n.do.absolute)})})}window.onload=init</script>";
c = CloudExport[SensorHTML,"HTML",Permissions->"Public"];
u=URLShorten[c[[1]]];
Return[{u,BarcodeImage[u,"QR"],listener}]
]
Device Motion - Acceleration Including Gravity (x, y, z):
ChannelDeploySensorPageAccelerationGravity[func_]:=Module[{listener,listenerurl,SensorHTML,c,url,u},
CloudConnect[];
listener=ChannelListen["Sensors",func[#Message]&,Permissions->"Public"];
listenerurl = listener["URL"];
SensorHTML="<!DOCTYPE html><html lang=en><meta charset=UTF-8><title>Sensors</title><script src=https://cdn.jsdelivr.net/npm/gyronorm@2.0.6/dist/gyronorm.complete.min.js></script><script>function makeXHR(n,t,o){var e=Date.now(),r=(Math.random(),new XMLHttpRequest);r.withCredentials=!0;var i=\""<>listenerurl<>"?operation=send&time=\"+e.toString()+\"&x=\"+n.toString()+\"&y=\"+t.toString()+\"&z=\"+o.toString();r.open(\"GET\",i,!0),r.send()}function init(){var n={frequency:100,gravityNormalized:!0,orientationBase:GyroNorm.WORLD,decimalCount:2,logger:null,screenAdjusted:!1},t=new GyroNorm;t.init(n).then(function(){t.start(function(n){makeXHR(n.dm.gx,n.dm.gy,n.dm.gz)})})}window.onload=init</script>";
c = CloudExport[SensorHTML,"HTML",Permissions->"Public"];
u=URLShorten[c[[1]]];
Return[{u,BarcodeImage[u,"QR"],listener}]
]
Device Motion - Rotation Rate (alpha, beta, gamma):
ChannelDeploySensorPageRotationRate[func_]:=Module[{listener,listenerurl,SensorHTML,c,url,u},
CloudConnect[];
listener=ChannelListen["Sensors",func[#Message]&,Permissions->"Public"];
listenerurl = listener["URL"];
SensorHTML="<!DOCTYPE html><html lang=en><meta charset=UTF-8><title>Sensors</title><script src=https://cdn.jsdelivr.net/npm/gyronorm@2.0.6/dist/gyronorm.complete.min.js></script><script>function makeXHR(n,t,o){var e=Date.now(),r=(Math.random(),new XMLHttpRequest);r.withCredentials=!0;var i=\""<>listenerurl<>"?operation=send&time=\"+e.toString()+\"&x=\"+n.toString()+\"&y=\"+t.toString()+\"&z=\"+o.toString();r.open(\"GET\",i,!0),r.send()}function init(){var n={frequency:100,gravityNormalized:!0,orientationBase:GyroNorm.WORLD,decimalCount:2,logger:null,screenAdjusted:!1},t=new GyroNorm;t.init(n).then(function(){t.start(function(n){makeXHR(n.dm.alpha,n.dm.beta,n.dm.gamma)})})}window.onload=init</script>";
c = CloudExport[SensorHTML,"HTML",Permissions->"Public"];
u=URLShorten[c[[1]]];
Return[{u,BarcodeImage[u,"QR"],listener}]
]
Applications
Real world applications of this sensor data abound - aside from the gesture recognition system described in post 2 (http://community.wolfram.com/groups/-/m/t/1386392), you could use this sort of data to make a pocket seismometer, a fall detector, electronic dice, investigate centrifugal motion, investigate friction... More examples available here: http://www.gcdataconcepts.com/examples.html. If you make a sensor-based project in Wolfram, or think of a new / innovative / interesting way to use this data, or if the code above is buggy / incomplete, please do share it in the comments below!
A Wolfram Notebook version of this post is attached.
-- Euan Ong
References
"Using Connected Devices": http://reference.wolfram.com/language/guide/UsingConnectedDevices.html
"Using your smart phone as the ultimate sensor array for Mathematica": http://community.wolfram.com/groups/-/m/t/344278
"Capturing Data from an Android Phone using Wolfram Data Drop": http://community.wolfram.com/groups/-/m/t/461190
"Sensorstream IMU+GPS": https://play.google.com/store/apps/details?id=de.lorenz_fenster.sensorstreamgps
"Sensors For The Web!": https://developers.google.com/web/updates/2017/09/sensors-for-the-web
"gyronorm.js": https://github.com/dorukeker/gyronorm.js
 Attachments:
Attachments:


