Hi everyone , I'd like to share my work about SNIPER DETECTION, which I prepared in 2015 for Wolfram Technology Conference. Unfortunately I didn't have the chance to participate so I want to share it with the community here.
Introduction
Modern armed military engagements pose several severe threats to the operating men and women in uniforms especially in novel genres of warfare such as urban operations, insurgency and guerrilla warfare. Sniper fire is a prevalent cause of loss in contemporary armed engagements, which is very hard to foresee and prevent due to its nature. Several systems developed to solve this problem are designed to locate the sniper after the shot such as acoustic, Infra Red and radar detection solutions Other active emission solutions comprise radars systems localizing barrels or exploits cat-eye effect principle using back scattering of emitted light by the sight or binocular of the sniper. The former types of solutions fail to produce a warning until the sniper pulls the trigger. The latter ones rely on active emission of radar or light waves which might become a disadvantage for the detection of the detector. A passive but preemptive system might be a progressive approach in this field, in the shape of a properly implemented solution based on image analysis. This study attempts to create a preliminary theoretical start with Mathematica Software, to passive, pre-shooting sniper detection problem.
Existing sniper detection systems
Several systems developed to solve this problem can be categorized in to two groups: First group comprises systems designed to locate the sniper after the shot. The second one comprises systems designed to locate the sniper before the shot. Acoustic, Infra Red and radar detection solutions belong to the first group, deployed individually or as an integrated multi-sensor detection system. Acoustic systems are based on the detection of sound waves generated by the muzzle blast or shockwaves generated by the supersonic flight of bullets. Infrared systems rely on sensing radiated Infra Red Signature originating from muzzle flash or the heat of bullet due to aerodynamic drag, barrel friction and contact with burning powder. However these systems need to wait fort he first shot to detect and analyze the trajectory of the bullet back to the triggerman. This may still be functional in the field but has the disadvantage of sacrificing the first target. Systems in the second category, rarely encountered in an opensource search in the internet, are meant to be a remedy fort his situation. These active emission solutions comprise radars systems localizing barrels or exploits cat-eye effect principle using back scattering of emitted light by the sight or binocular of the sniper.
Image analysis approach to sniper detection
The sniper detection systems stated above have their pros and cons. First category fails to produce a warning until the sniper pulls the trigger. Second category relies on active emission of radar or light waves which might become a disadvantage for the detection of the detector. A passive but preemptive system might be a progressive approach in this field, in the shape of a properly implemented solution based on image analysis. Evidently, in nature it is impossible to find a perfect circle or ellipse and if somehow we detect a circular or elliptical shape between trees, bushes, reeds, rocks or earth there is a good possibility that it is the tip of a barrel, a binocular or a sight of a sniper rifle. Fort his idea to work the detector camera of the friendly soldier must be in sight with the aiming barrel and optical system, otherwisE would mean the threat is not prominent anyway.
Application and discussion
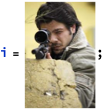
Best thing with Mathematica is that, one can carry out computations and analyses with built in functions without having to deal with the mathematical fundamentals of the subject. So this study is not based on extensive image processing knowledge but utilizes a Mathematica code taken from a well known Mathematica users forum (http://mathematica.stackexchange.com/questions/11725/how-to-find-circular-objects-in-an-image) comprising built in image processing functions.

(see full image here)
mb = MorphologicalBinarize[i];
cn = ColorNegate[Closing[mb, 12]];
sc = SelectComponents[cn, {"Eccentricity", "Circularity"}, #1 < 2 && #2 < 9 &];
Colorize[sc];
ImageApply[#*0.25 &, i, Masking -> ColorNegate[sc]]

Barrel tip is ignored and the sniper is detected from the binoculars. Another example, with a more overt enemy:
(see full image here)
mb = MorphologicalBinarize[i]; cn = ColorNegate[Closing[mb, 12]];
sc = SelectComponents[ cn, {"Eccentricity", "Circularity"}, #1 < 2 && #2 < 9 &];
Colorize[sc];
ImageApply[#*0.25 &, i, Masking -> ColorNegate[sc]]

In this trial again the Binocular sight makes it possible to identify the sniper. Another successful example:

(see full image here)
mb = MorphologicalBinarize[i]; cn = ColorNegate[Closing[mb, 12]];
sc = SelectComponents[ cn, {"Eccentricity", "Circularity"}, #1 < 2 && #2 < 9 &];
Colorize[sc];
ImageApply[#*0.25 &, i, Masking -> ColorNegate[sc]]

Binocular sight detected. The algorithm keeps ignoring the barrel tip. Now a few unsatisfactory trials: In the first one the barrel and the binocular are out of sight. Our identification system sees part of the face and a lot of clutter. In the second example binocular is very well hidden so the system doesn't work at all. In the third example actually there is no sniper and the system is supposed to return nothing, bu it detects some clutter.

Conclusion
This study attempts to create a preliminary theoretical start with Mathematica Software, to passive, pre-shooting sniper detection problem. Apparently it has to be developed much further to avert failures, false alarms and clutter both in open field pictures and urban environment pictures where the possibility of encountering man made circles which are not related to sniper rifles is much higher. Field implementation of this approach would be another interesting challenge, which has to use a sort of hardware like Raspberry Pi to run Mathematica, a camera mounted on a servo motor to scan 360 degrees azimuth and a certain elevation angle interval, a laser range finder to feed the focus distance data to camera.
 Attachments:
Attachments:


