Hi, the Bungee jump example has a spring damper that is always attached, so it's not like jumping on a trampoline made out of spider web, where as long as you are in the air, there is no effect on the web.
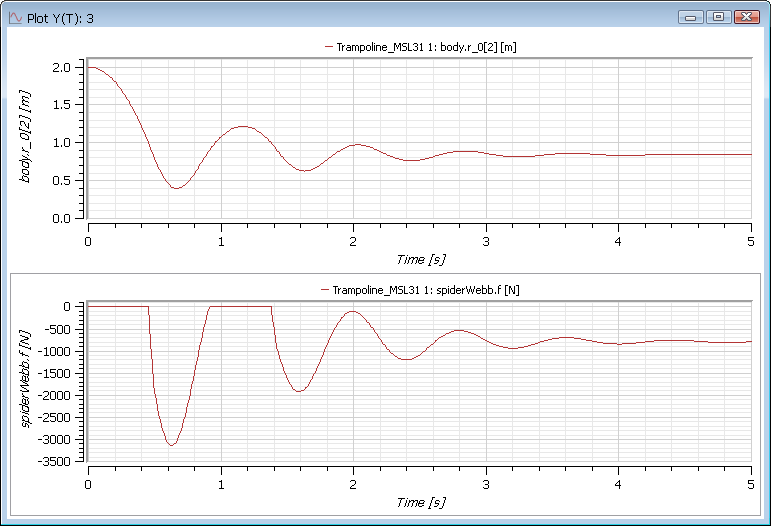
If you use this model instead, the body wont hit the web until h=1, due to the gap in the ElastoGap model. The force in the spiderWeb component tells you how much tension is imposed on the web, and the momentum of the person depends on it's mass (body.m) and initial condition (height over trampoline).
model Trampoline
Modelica.Mechanics.MultiBody.Parts.Body body(r_0.start={0,2,0}, m=80, r_0.fixed=true) annotation(Placement(visible=true, transformation(origin={10,10}, extent={{-10,-10},{10,10}}, rotation=0)));
inner Modelica.Mechanics.MultiBody.World world(animateWorld=false, animateGravity=false) annotation(Placement(visible=true, transformation(origin={-130,10}, extent={{-10,-10},{10,10}}, rotation=0)));
Modelica.Mechanics.MultiBody.Forces.LineForceWithMass lineForceWithMass annotation(Placement(visible=true, transformation(origin={-30,10}, extent={{-10,-10},{10,10}}, rotation=0)));
Modelica.Mechanics.Translational.Components.ElastoGap spiderWebb(c=5000, d=200, s_rel0=2) annotation(Placement(visible=true, transformation(origin={-30.0,50.0}, extent={{-10.0,-10.0},{10.0,10.0}}, rotation=0)));
equation
connect(spiderWebb.flange_a,lineForceWithMass.flange_a) annotation(Line(visible=true, origin={-39.6,33.33}, points={{-0.4,16.67},{-3.4,16.67},{-3.4,-10.005},{3.6,-10.005},{3.6,-13.33}}, color={0,127,0}));
connect(lineForceWithMass.flange_b,spiderWebb.flange_b) annotation(Line(visible=true, origin={-20.31,33.33}, points={{-3.69,-13.33},{-3.69,-10.005},{3.535,-10.005},{3.535,16.67},{0.31,16.67}}, color={0,127,0}));
connect(lineForceWithMass.frame_a,world.frame_b) annotation(Line(visible=true, origin={-80,10}, points={{40,0},{-40,0}}));
connect(body.frame_a,lineForceWithMass.frame_b) annotation(Line(visible=true, origin={-10,10}, points={{10,-0},{-10,0}}));
annotation(Diagram(coordinateSystem(extent={{-148.5,-105},{148.5,105}}, preserveAspectRatio=true, initialScale=0.1, grid={5,5})));
end Trampoline;
Here's a plot of the force and position:
I Hope this helps.


