Dear Neil and Sergio,
Thank you very much indeed for your suggestions. They are indeed very useful.
Currently I'm using a simple dummy system in order to become acquainted with the software and it's easy to set the initial conditions to the equilibrium state by adding a suitable initial equation depending of the physical parameters of the system. This way WSMLinearize can succesfully provide the state space equations. In the future, when the system becomes complex, letting the simulation run until reaching the steady state and then initializing the system from the experiment will likely be the way to go. Even with the ground motion the steady state should be close to the equilibrium conditions.
From seeing Neil's diagram I as able to simplify my system to the following:
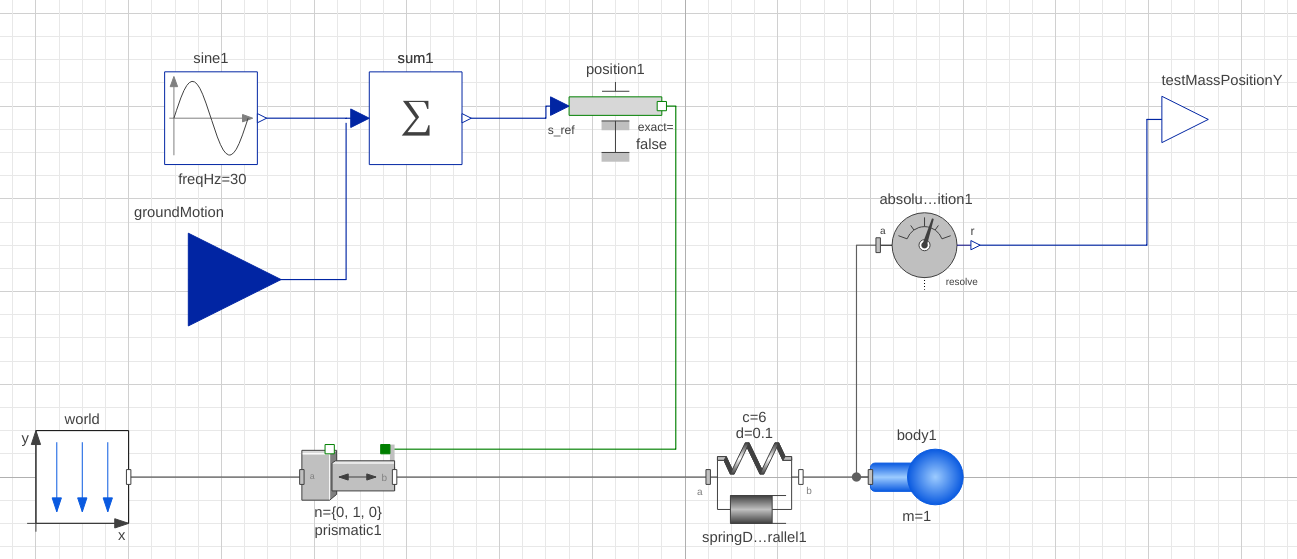
The sinusoidal generator mimics the ground motion with a zero offset and there's an added input for Modelica and Mathematica to treat it as such when linearizing in Mathematica. By setting the amplitude of the sine wave to zero, Mathematica does calculate numerically the state space model and then the transfer function.
However, there's an additional problem. The position1 component has a filter in order to numerically calculate the acceleration. This changes badly the behavior of the transfer function. I still have to check whether I can change the parameters of the filter in order to get the correct answer numerically, however, in reality I need to turn the filter off completely because I will need to do some symbolic calculations later using Mathematica. The problem is that when I set the "exact" boolean parameter of position1 to true the compiler does not accept the groundMotion input not being fed.
I did confirm that by removing the input and putting an explicit zero there I get the correct state space equations. However, in such case the ground motion does not appear as an input and I cannot calculate the transfer function with TransferFunctionModel.
By any chance do you know if in my version of SyetemModeler and Mathematica there's an option to calculate the transfer function to an output from a state variable which was not declared as an input beforehand?
I'm using SystemModeler 5.1.0 and Mathematica 11.3.0.0.
Thank you very much indeed for your comments.
By the way, I did not find an option to change the title of the post. It would be good indeed to change it to something more descriptive of what we're writing about.
Regards,
Fabian


