Fabian,
I do not think that this statement is true
As far as I understand, in order to generate a state space model in Mathematica (via WSMLinearize) with such variable as an input, in the Modelica model the position of the suspension point must be declared as an input variable within the connector representing the physical attachment point to the ground, making the connector causal.
I am not certain what you want but I think you can do the following.
Take your multibody system and hook up an input to drive the model. Here is an example. I hooked an input, u, to the "y" direction of the force and 0 to the x and z directions (since the bodies were constrained to move only in "y".
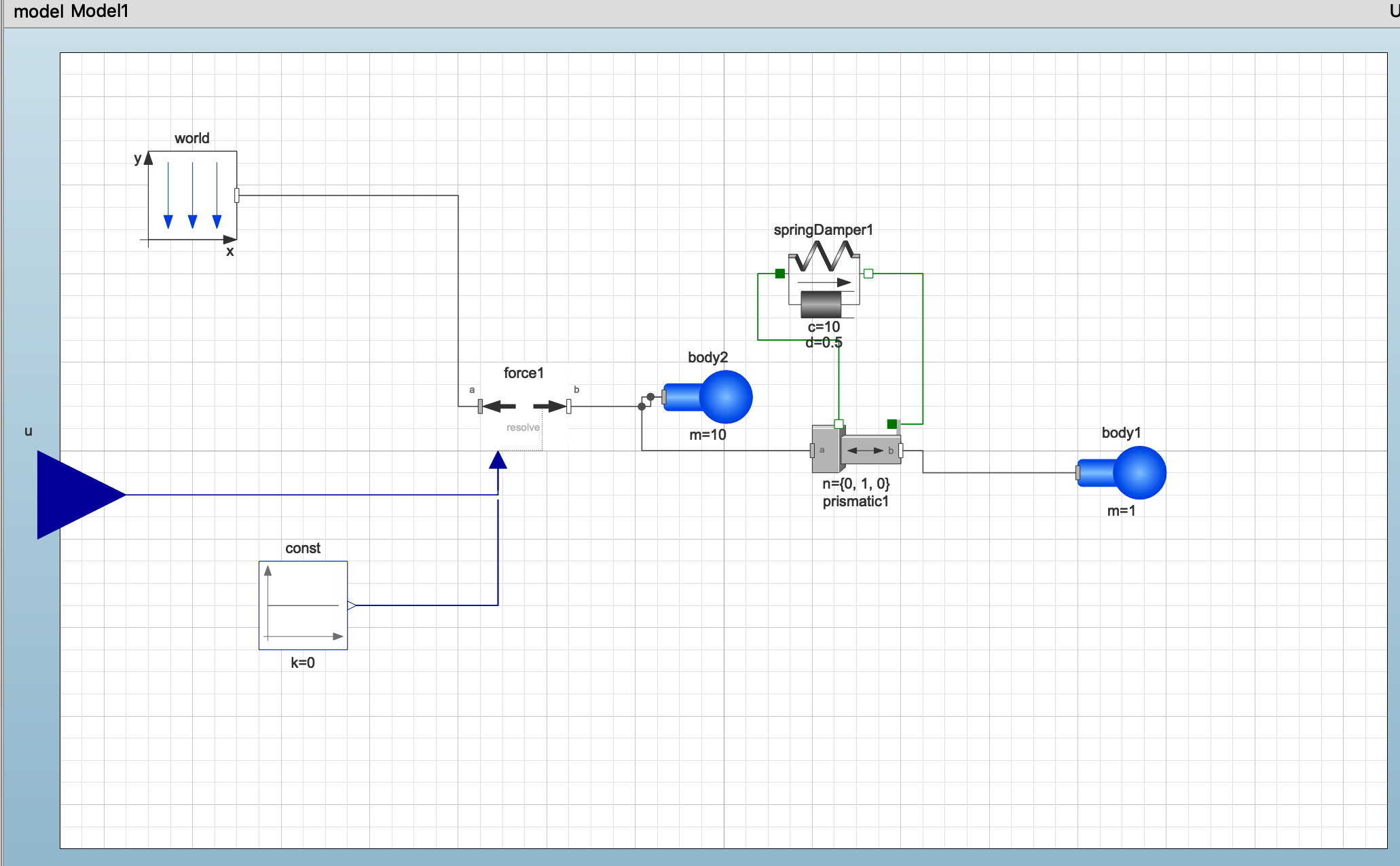
I obtained the transfer function, tf, from the following and I verified the vibration frequency of 0.528 hz against a simulation in WSM.
model = SystemModel["Model1"]
eigensys = SystemModelSimulate[model,All,0.01];
nlsm =WSM`LocalizedSystemModel[eigensys,"StopTime"];
nsimp = nlsm["SelectOutputs",{"body1.r_0[2]"}];
nsimp2 = nsimp["Simplify"];
nssmodel = nsimp2["Linearization"];
tf =TransferFunctionModel[nssmodel];
poles = Flatten[TransferFunctionPoles[tf]];
freq = Abs[poles[[1]]]/2/Pi
You can also leave in some variables in the linearization with something like this:
lsm =WSM`LocalizedSystemModel[eigensys,"StopTime",<|"SymbolicParameters"->{"springDamper1.c"}|>];
and get the transfer function (and the corresponding eigenvalues) as a function of the damper (after completing the other steps above obtaining tf). You can get the eigenvalues by doing:
Eigenvalues[First[Normal[StateSpaceModel[tf]]]]
I hope this helps.
Regards
Neil
Edit: fixed the image


