In a futile attempt to save some hand calculation time (and get in much needed practice in system modeler), I decided to modify an already existing model,
"PistenEngine" from the PlanarMechanics example list and simply replicate it one to one in Modelica parts.
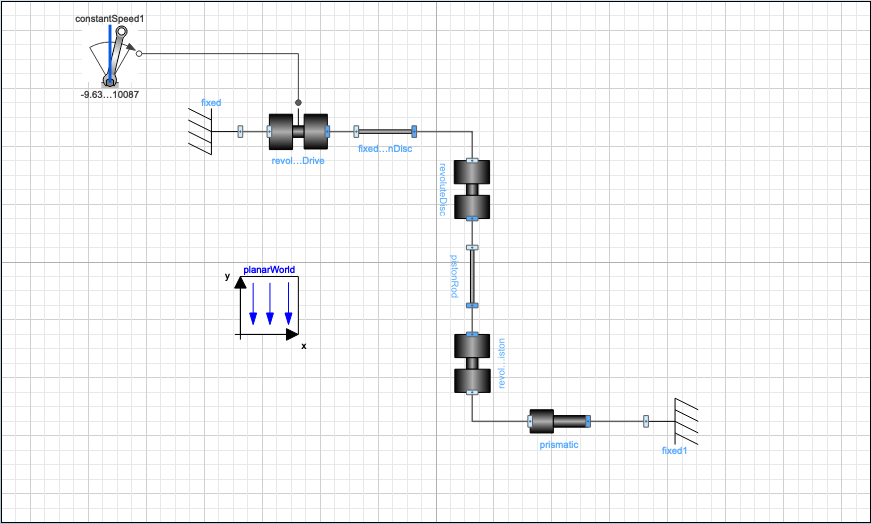
The original model (with added constant angular velocity)
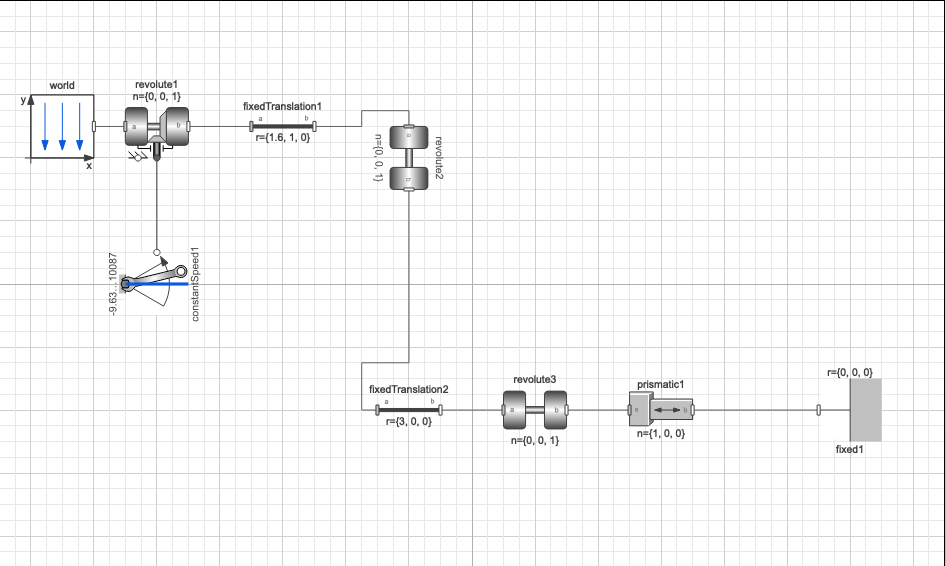
and my new version
I intend to extent my model with other things, however I just wanted to get this working first in what I thought would be mere minutes to be now constantly hit with errors of singularity.
Building "flywheel" as experiment "temporary-experiment" started at 13:35:35 [:0:0-0:0] Error: Model is structurally singular, the following equations do not allow to solve for required variables:
Then there is a massive list of equation errors.
There is something I am fundamentally misunderstanding? If this model is singular, why does planarmechanics have no issues?


