I am working on a little project to help learn more of SystemModeler and modeling within that environment.
I have a working physical test bench of the system I choose to simulate, I would like to simulate and design and test different control schemes via SystemModeler, Mathematica and the Microcontroller Kit.
The system being a 3d inverted pendulum, like the Cubli.
When simulating the single degree of freedom, I have great stabilization.
This model is in-fact the second version of it I have designed, the first version using Bodyshapes classes while this newer version uses Rotorswith3Deffects
I have changed the model to use the rotors as the angle/control reactions in the first did not reflect reality with the physical test bench, while the newer version is almost nearly identical...but I digress.
When inverting this model to stand on its corner to be a 3DOF, 3D pendulum, I am now getting constant "torn" errors, which I can view with the Equation browser, however I can't begin to understand how this is helpful, or what I can do, beyond what it seems to be setting initial conditions to repair the problem...this however leads to an ever increasing cascade in more torn system errors. 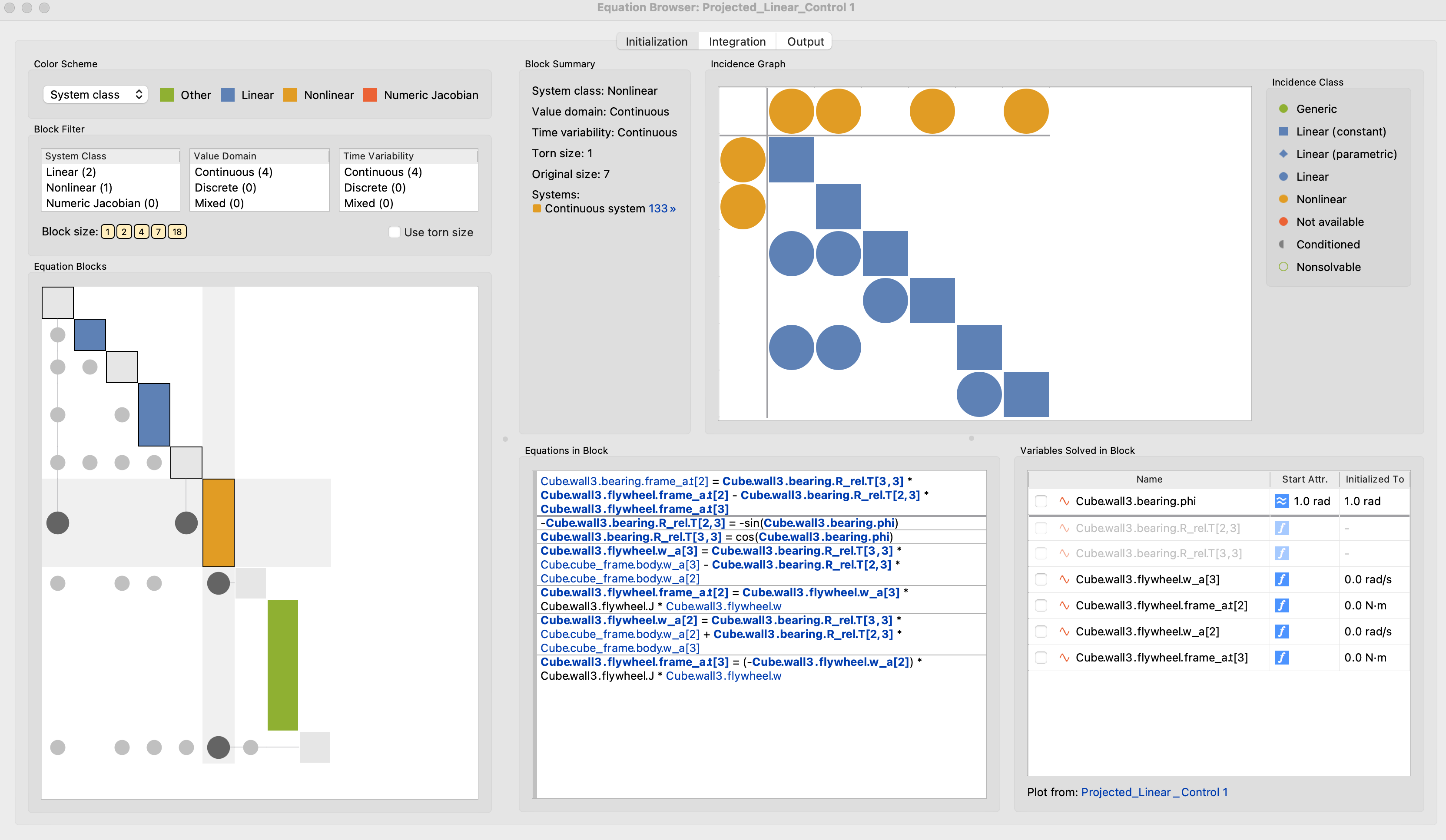
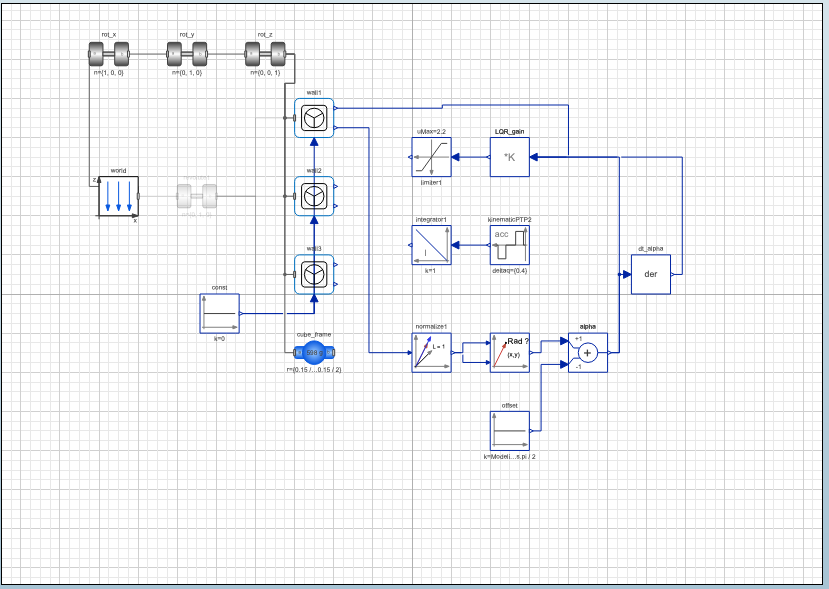
My model isn't particularly large I think but I am using several custom subsystems and functions, I realize, but for an idea of what I have built, see the below images.
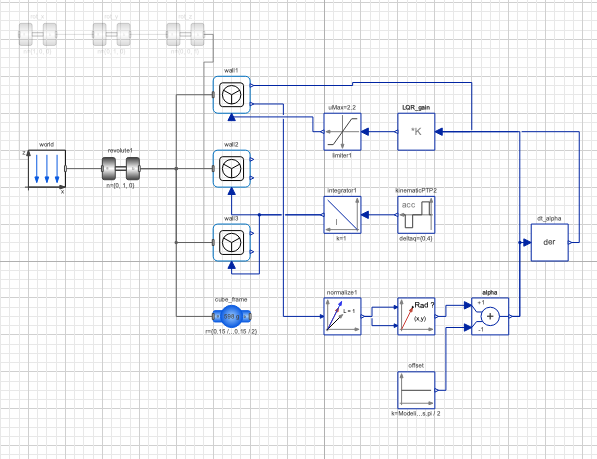
The working Single DOF system with control.
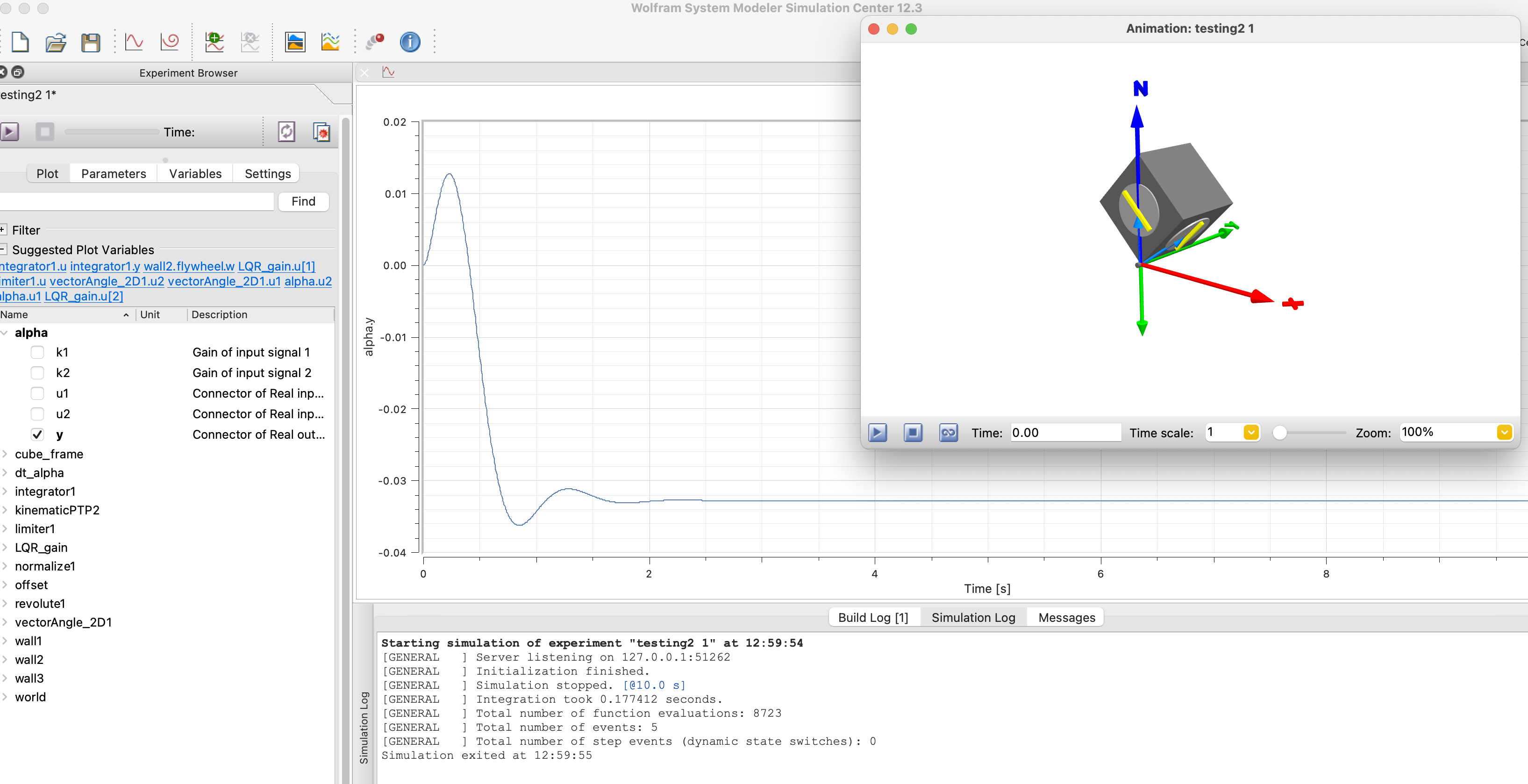
The Same system with 3 DOF activated, causing torn system.
I don't think this is a particularly interesting or difficult nonlinear system to Solve for SystemModeler...I feel this has something to do with the Rotorswith3dEffects but since this works in the 1DOF systems, I am somewhat at a loss.
How can I fix the torn system via the equation browser? Is this is the wrong direction to follow? Is there a better way or thing to look out for?
I have looked at the GyroscopicEffects example from recommendations from previous questions...which is how I managed to come up with the model I have (which again works great in the 1DOF simulation).
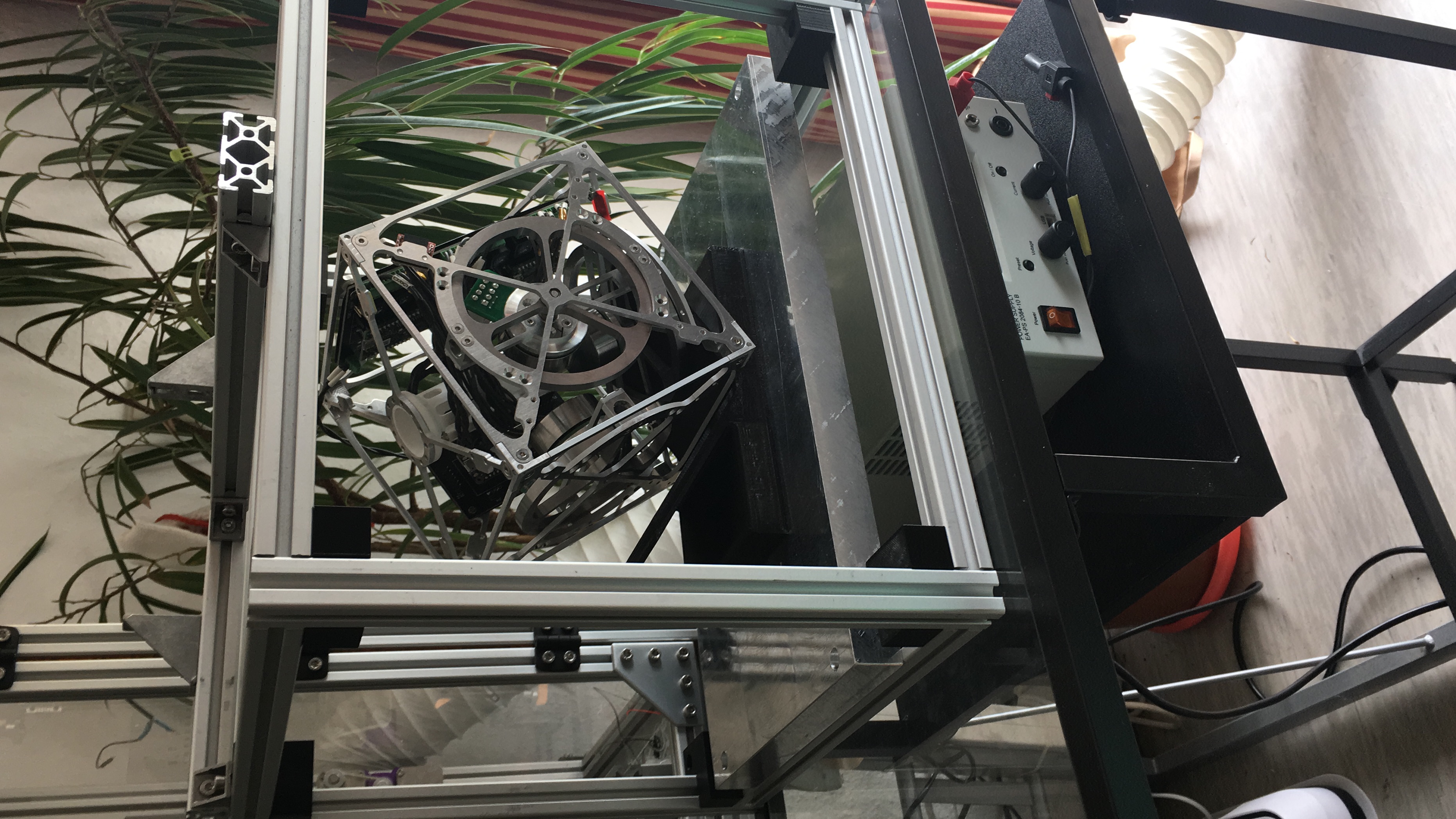
My physical test bench for reference: