I noticed the following question here:
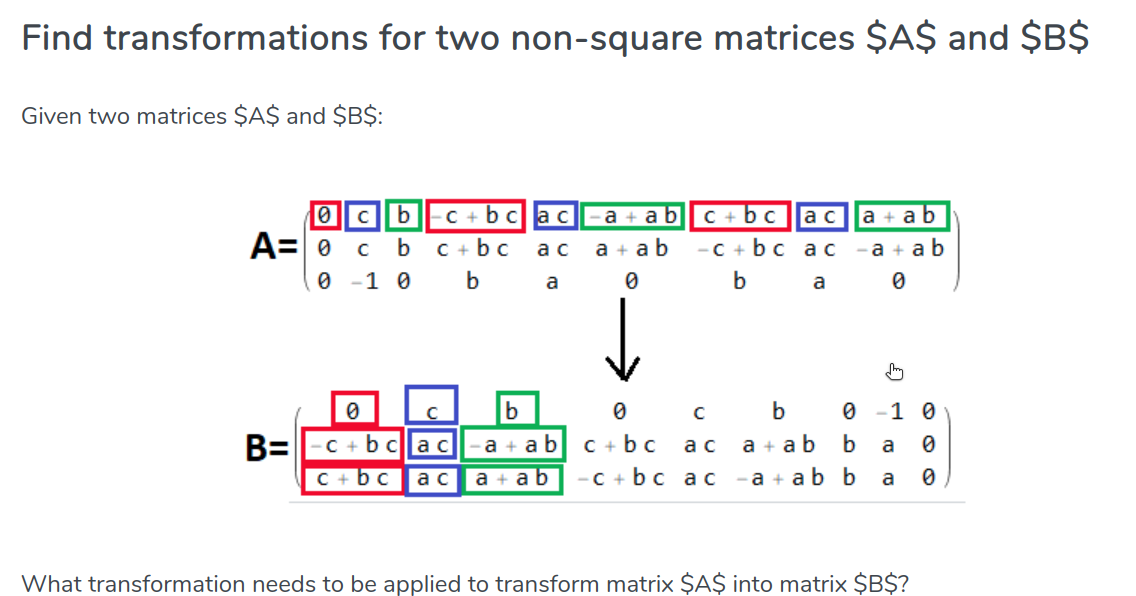
In[1]:= A = {{0, c, b, -c + b c, a c, -a + a b, c + b c, a c,
a + a b}, {0, c, b, c + b c, a c, a + a b, -c + b c,
a c, -a + a b}, {0, -1, 0, b, a, 0, b, a, 0}}
B = {{0, c, b, 0, c, b, 0, -1, 0}, {-c + b c, a c, -a + a b, c + b c,
a c, a + a b, b, a, 0}, {c + b c, a c, a + a b, -c + b c,
a c, -a + a b, b, a, 0}};
Out[1]= {{0, c, b, -c + b c, a c, -a + a b, c + b c, a c,
a + a b}, {0, c, b, c + b c, a c, a + a b, -c + b c,
a c, -a + a b}, {0, -1, 0, b, a, 0, b, a, 0}}
I also noticed the example code given on the same website as follows, which does not seem to be the solution to this problem and is very lengthy:
In[15]:= Rx = RotationMatrix[\[Phi][t], {1, 0, 0}];
Ry = RotationMatrix[\[Xi][t], {0, 1, 0}];
Rz = RotationMatrix[\[Psi][t], {0, 0, 1}];
Q = Rz . Ry . Rx;
v = {\[Phi][t], \[Xi][t], \[Psi][t]};
T1 = Flatten /@ D[Q, {v}];
T2 = Flatten /@ D[Transpose[Q], {v}];
P1 = {{1, 0, 0, 0, 0, 0, 0, 0, 0}, {0, 0, 0, 1, 0, 0, 0, 0, 0}, {0, 0,
0, 0, 0, 0, 1, 0, 0}, {0, 1, 0, 0, 0, 0, 0, 0, 0}, {0, 0, 0, 0,
1, 0, 0, 0, 0}, {0, 0, 0, 0, 0, 0, 0, 1, 0}, {0, 0, 1, 0, 0, 0, 0,
0, 0}, {0, 0, 0, 0, 0, 1, 0, 0, 0}, {0, 0, 0, 0, 0, 0, 0, 0, 1}};
A1 = T1 . {{1, 0, 0}, {0, 0, 0}, {0, 0, 0}, {0, 1, 0}, {0, 0, 0}, {0,
0, 0}, {0, 0, 1}, {0, 0, 0}, {0, 0, 0}};
A2 = T1 . {{0, 0, 0}, {1, 0, 0}, {0, 0, 0}, {0, 0, 0}, {0, 1, 0}, {0,
0, 0}, {0, 0, 0}, {0, 0, 1}, {0, 0, 0}};
A3 = T1 . {{0, 0, 0}, {0, 0, 0}, {1, 0, 0}, {0, 0, 0}, {0, 0, 0}, {0,
1, 0}, {0, 0, 0}, {0, 0, 0}, {0, 0, 1}};
Transpose[P1 . ArrayFlatten[{{A1}, {A2}, {A3}}]] ==
Flatten /@ D[Transpose[Q], {v}] // MatrixForm
Out[26]//MatrixForm= \!\(
TagBox["True",
Function[BoxForm`e$,
MatrixForm[BoxForm`e$]]]\)
Is there a neat solution to this problem?
Regards, Zhao


