Greetings to all,
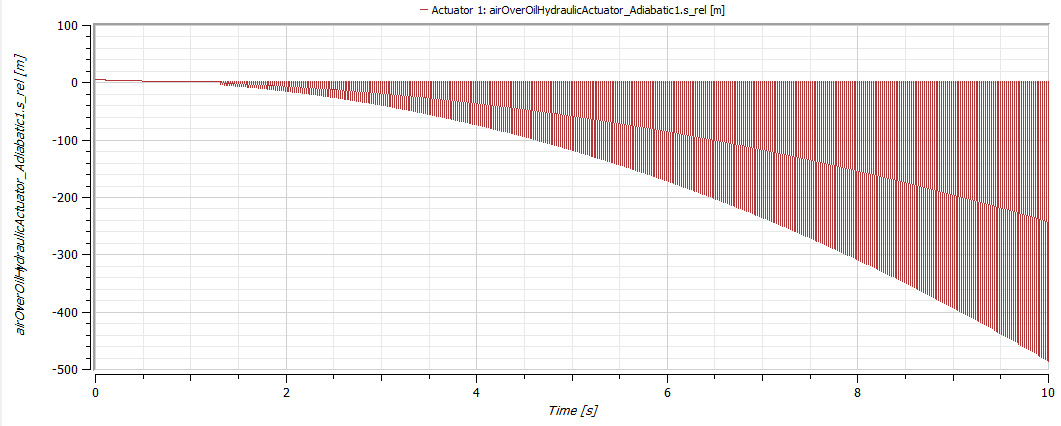
I'm trying to model an actuator. When I use the following line of code to define the limits of the extended and retracted length of the actuator, I get the following graph:
s_rel=smooth(0, if strokeUpperLimit then l_cyl else if strokeLowerLimit then l_cyl + l_rod else flange_a.s - flange_b.s);
What is the best way to put limits to a variable ?


