Hello :) I am a beginner in the Wolfram system.
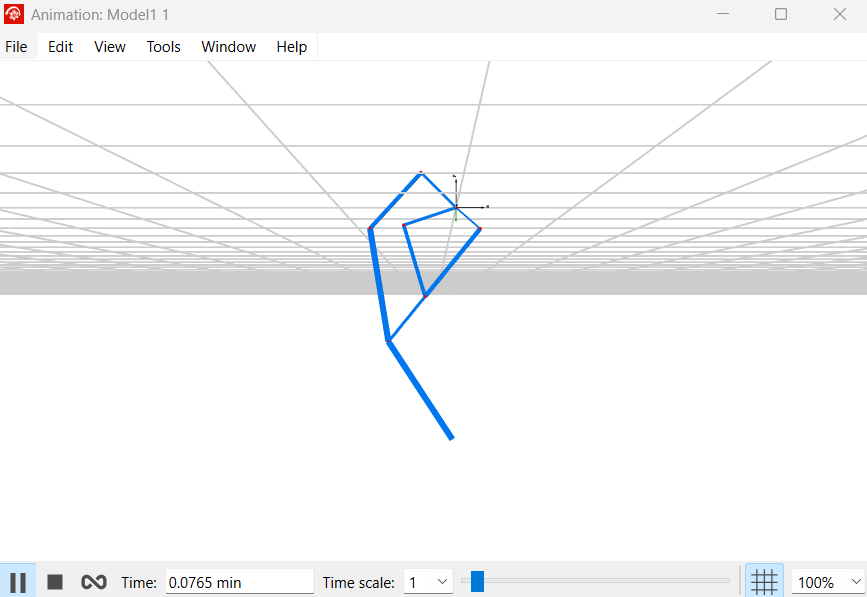
I have produced a basic model of a 6-bar linkage leg mechanism in wolfram system modeler.
Using the model here:
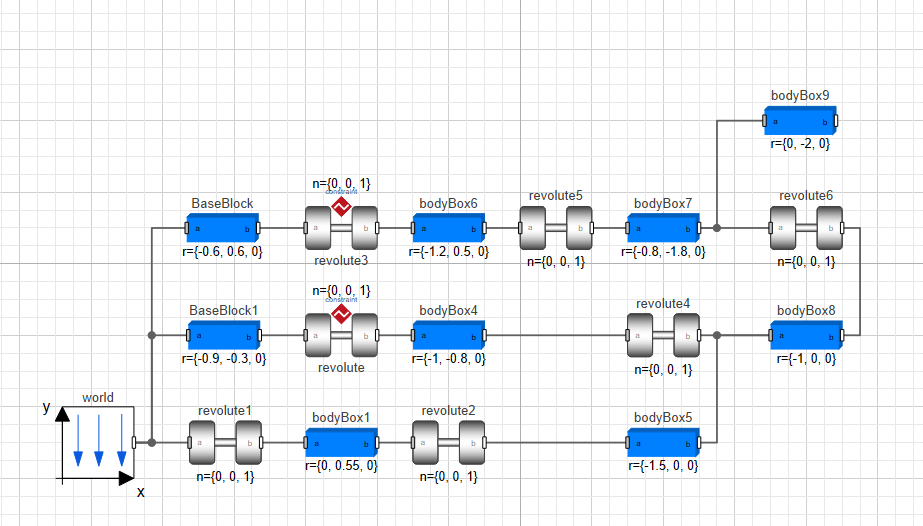
I am using the BaseBlocks as a way to position the rotational points of the 2 link arms. I currently have placeholder values for the linkage lengths to allow the simulation to be generated. My objective is to simulate different linkage lengths (and positioning of the base links), to determine the optimal design for forward linear motion (walking forward).
I would be immensely grateful for any feedback on how I should best proceed with running simulations and optimising the design, what sensor/metric I should use to measure design success, and whether i should do this through Wolfram Mathematica or SystemModeler (i have seen videos of SystemModeler designs being imported into Mathematica)?
My sincere thanks in advance!


