I'm slowly grinding through the tutorials in the getting started guide and would like to try and build on the chain link pendulum example.
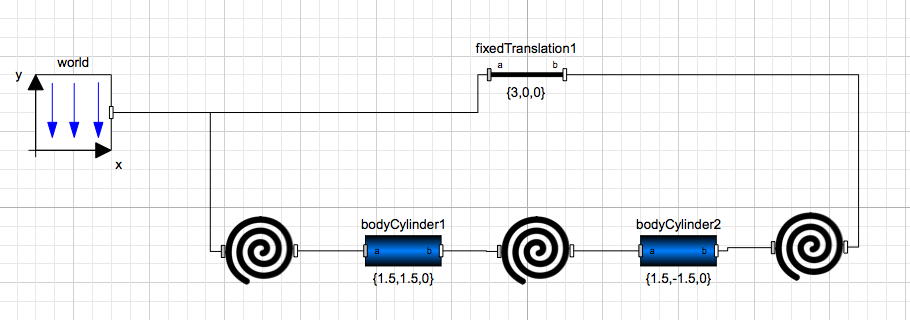
Firstly I tried to fix the end of the pendulum, so that the chain would drape. Screenshot of my model below.
Then my second goal is to create a horizontal roller support, so that the rotational springs could hold it in position through their rotational stiffness.
I'd genuinely appreciate any guidance on how to create a horizontal roller, or create multiple support points.
*The spirals are revolute joints, with springs and dampeners attached. If I remove the fixed translation component, the model functions quite happily as a chain pendulum.
All help gratefully received.


