Hello. I'm new to SystemModeler. I'm attempting to learn the software with highly simplified experiments/models. At the moment, I'm trying to model a rotating a mass that is moved by a prismatic joint (representing a simplified hydraulic cylinder) as shown in Image1. 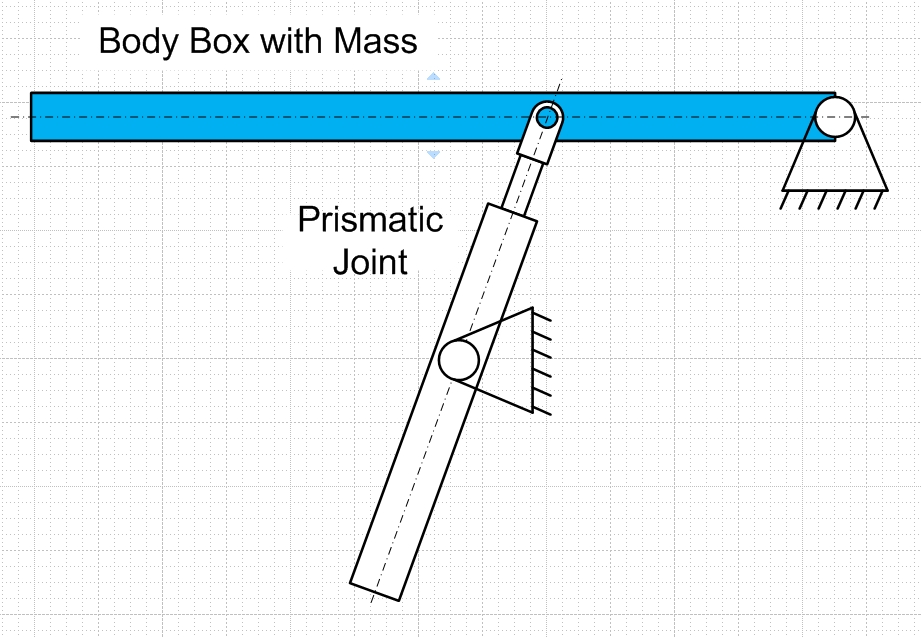
With a combiTimeTable and position source, I animated the model. The smoothness of the combiTimeTable was set to ContinuousDerivative. The relative distance between the prismatic joint's frames, s, is shown below in Image2. This is a screen grab in Simulation Center. This is, indeed, the profile that I intended to input.
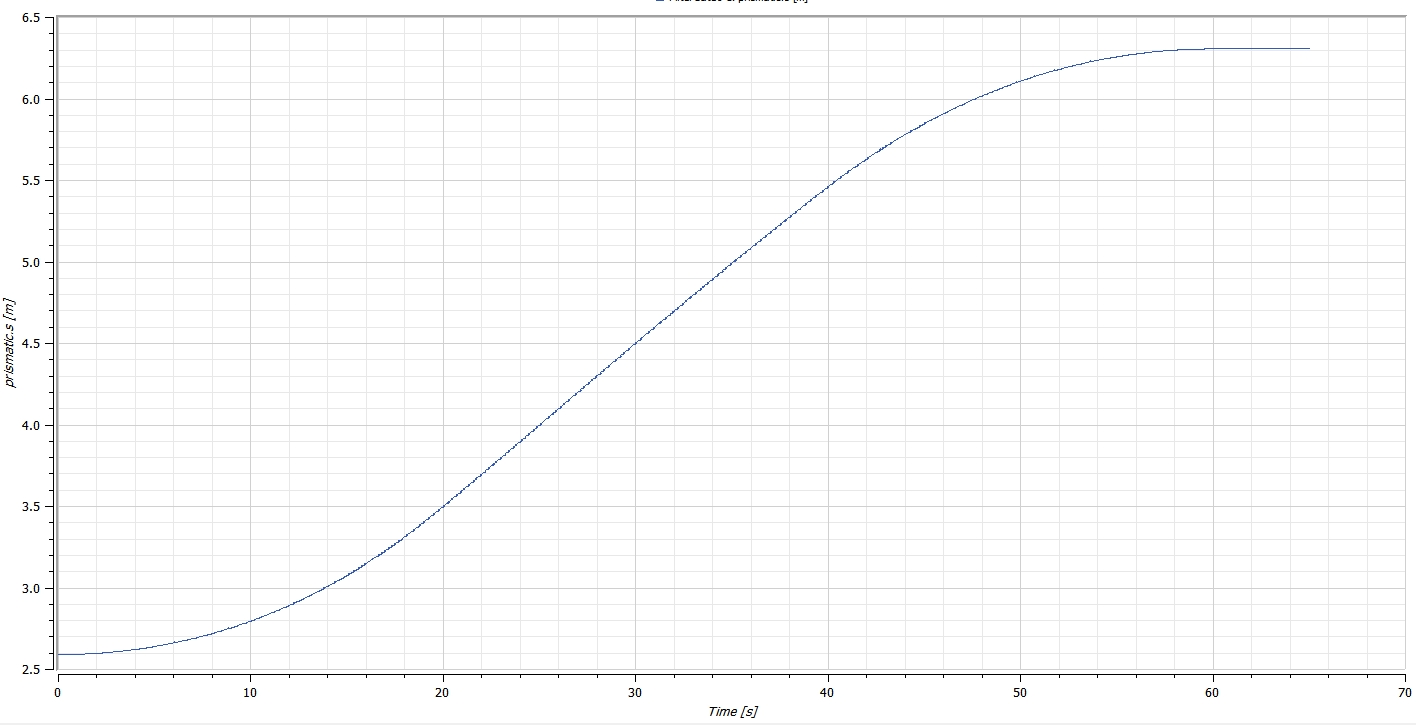
The velocity profile of the prismatic joint, v, is about what I expected it to be as displayed in Simulation Center. (Please see Image3) As you can see, the initial position profile that I built in Excel for the combiTimeTable is based upon nearly constant acceleration and deceleration. The velocity profile isn't quite as smooth as I'd like it to be at the end of the acceleration phase and at the start of the deceleration phase, but things here aren't horrible. My main concern relates to the acceleration profile.
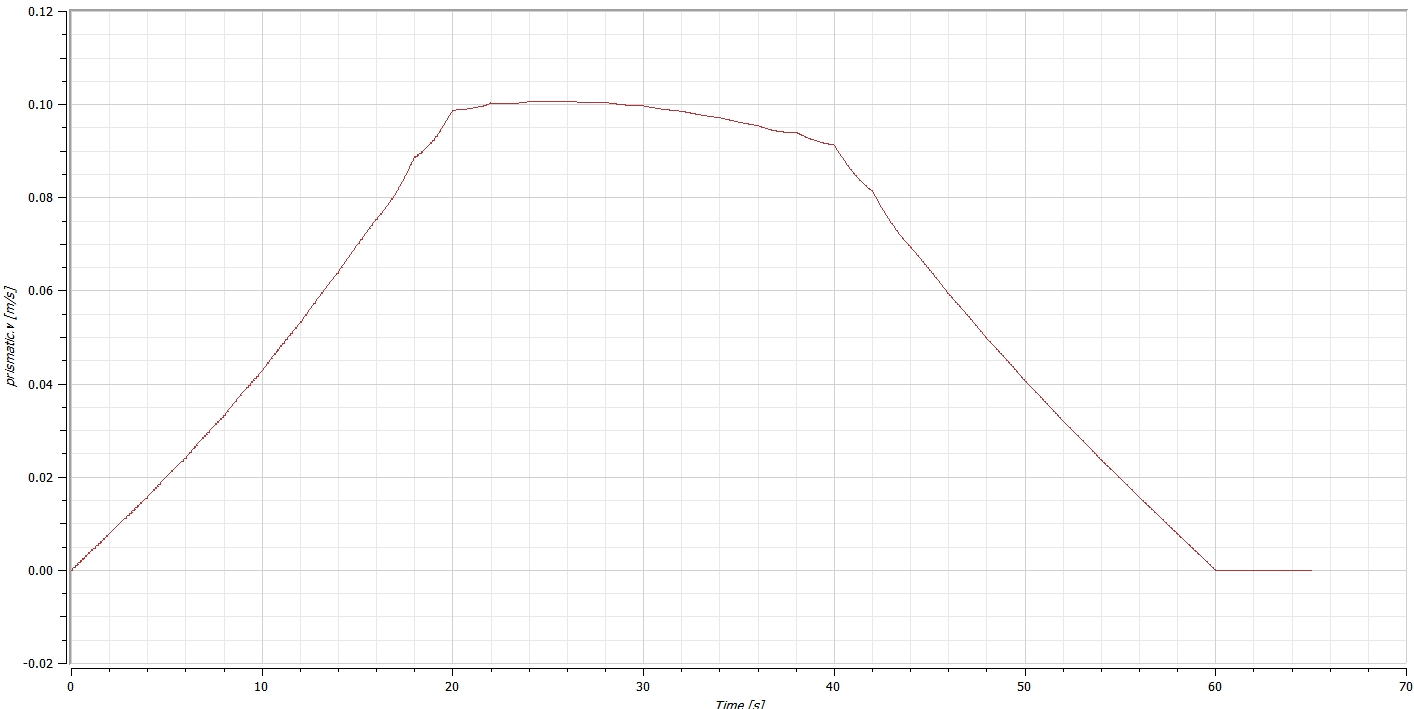
And here is the meat of my question... When I plot the prismatic joint's acceleration, a, I get a very noisy plot. Considering my use of a combiTimeTable to control the length of the prismatic joint, can I control the filtering/averaging of the prismatic joint's acceleration? I'm quite sure I'm doing something foolish here. Thanks in advance for any help/advice that might be offered.