Hello! Last weekend I was at a hackathon at Georgetown University where my team and I wrote a python program that allowed our home made delta robot to autonomously play tic tac toe with a human user. The Mathematica program I was working on was written to interface the arduino controlling the delta robot, and the python program which has the tic tac toe algorithm, by relaying information about the user input on the board through image processing.
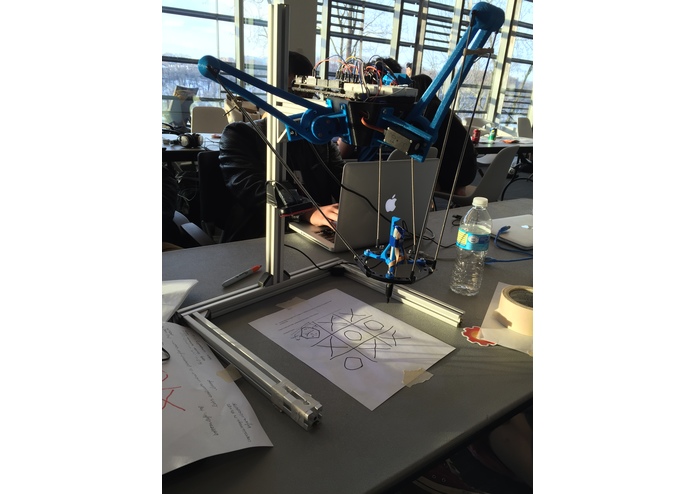
The user input had to be from the computer however because I wasn't able to finish the image processing. The img was an image of the board taken by a logitech web cam attached to the main shaft of the robot. It didn't work reliably but did work generally.
Does anyone have a better way of doing this? Thanks!
P.S. here is the code: http://paste.ofcode.org/JCyYF2tJtpcmRta8YjMhmW
src = ColorConvert[img, "Grayscale"];
white = Closing[src, DiskMatrix[5]];
srcAdjusted = Image[ImageData[src]/ImageData[white]]
components =
ComponentMeasurements[
ColorNegate@Binarize[srcAdjusted], {"ConvexArea", "Mask"}][[All,
2]];
largestComponent = Image[SortBy[components, First][[-1, 2]]]
mask = FillingTransform[Closing[largestComponent, 2]]
lY = ImageMultiply[
MorphologicalBinarize[
GaussianFilter[srcAdjusted, 3, {2, 0}], {0.02, 0.05}], mask];
lX = ImageMultiply[
MorphologicalBinarize[
GaussianFilter[srcAdjusted, 3, {0, 2}], {0.02, 0.05}], mask]
verticalGridLineMasks =
SortBy[ComponentMeasurements[
lX, {"CaliperLength", "Centroid", "Mask"}, # > 100 &][[All, 2]], #[[2, 1]] &][[All, 3]];
horizontalGridLineMasks =
SortBy[ComponentMeasurements[
lY, {"CaliperLength", "Centroid", "Mask"}, # > 100 &][[All, 2]], #[[2, 2]] &][[All, 3]];
centerOfGravity[l_] :=
ComponentMeasurements[Image[l], "Centroid"][[1, 2]]
gridCenters =
Table[centerOfGravity[
ImageData[Dilation[Image[h], DiskMatrix[2]]]*
ImageData[Dilation[Image[v], DiskMatrix[2]]]], {h,
horizontalGridLineMasks}, {v, verticalGridLineMasks}];
Show[src,
Graphics[{Red,
MapIndexed[{Point[#1], Text[#2, #1, {1, 1}]} &, gridCenters, {2}]}]]
tr = Last@
FindGeometricTransform[
Extract[gridCenters, {{4, 1}, {4, 2}, {3, 1}}], {{0, 0}, {0, 1}, {1, 0}}]
ts = Last@
FindGeometricTransform[
Extract[gridCenters, {{3, 1}, {3, 2}, {2, 1}}], {{0, 0}, {0, 1}, {1, 0}}]
tt = Last@
FindGeometricTransform[
Extract[gridCenters, {{2, 1}, {2, 2}, {1, 1}}], {{0, 0}, {0, 1}, {1, 0}}]
tu = Last@
FindGeometricTransform[
Extract[gridCenters, {{4, 2}, {4, 3}, {3, 2}}], {{0, 0}, {0, 1}, {1, 0}}]
tv = Last@
FindGeometricTransform[
Extract[gridCenters, {{3, 2}, {3, 3}, {2, 2}}], {{0, 0}, {0, 1}, {1, 0}}]
tv2 = Last@
FindGeometricTransform[
Extract[gridCenters, {{2, 2}, {2, 3}, {1, 2}}], {{0, 0}, {0, 1}, {1, 0}}]
tw = Last@
FindGeometricTransform[
Extract[gridCenters, {{4, 3}, {4, 4}, {3, 3}}], {{0, 0}, {0, 1}, {1, 0}}]
tx = Last@
FindGeometricTransform[
Extract[gridCenters, {{3, 3}, {3, 4}, {2, 3}}], {{0, 0}, {0, 1}, {1, 0}}]
tz = Last@
FindGeometricTransform[
Extract[gridCenters, {{2, 3}, {2, 4}, {1, 3}}], {{0, 0}, {0, 1}, {1, 0}}]
pics = {ImageTransformation[src, tr, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, ts, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, tt, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, tu, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, tv, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, tv2, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, tw, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, tx, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}],
ImageTransformation[src, tz, {200, 200}, DataRange -> Full,
PlotRange -> {{0, 1}, {0, 1}}]}
find[img_] :=
(croppy = ImageCrop[img, {180, 180}];
bin = ColorNegate@
Binarize[ImageAdjust[GaussianFilter[croppy, 5]]];
components =
ComponentMeasurements[
bin, {"Centroid", "Area", "FilledCircularity",
"EquivalentDiskRadius"}, #2 > 100 &];
Show[croppy,
Graphics[{Thick {If[#[[3]] > 0.5, Red, Blue],
Circle[#[[1]], #[[4]]]} & /@ components[[All, 2]]}]] );


