I assume the notebook might not be complete. Please try the following code using new features from later version of WL (nb also attached):
Function definition
LotkaVolterra[{a_?NumericQ,b_?NumericQ,c_?NumericQ,d_?NumericQ},{prey0_?NumericQ,preditor0_?NumericQ},tmax_?NumericQ]:=NDSolveValue[{x'[t]==a *x[t]-b* x[t]*y[t],y'[t]==-c*y[t]+d* x[t]*y[t],x[0]==prey0,y[0]==preditor0},{x[t],y[t]},{t,0,tmax}]
Dynamic Interface
Manipulate[Plot[Evaluate[LotkaVolterra[{a,b,c,d},{prey0,preditor0},tmax]],{t,0,tmax},PlotRange->All,PlotStyle->{Red,Blue}],{{a,1},-5,5},{{b,1},-5,5},{{c,1},-5,5},{{d,1},-5,5},{{prey0,3},0,20},{{preditor0,5},0,20},{{tmax,40},.01,50},ControlPlacement->Top]
I have this result in V12.3+ 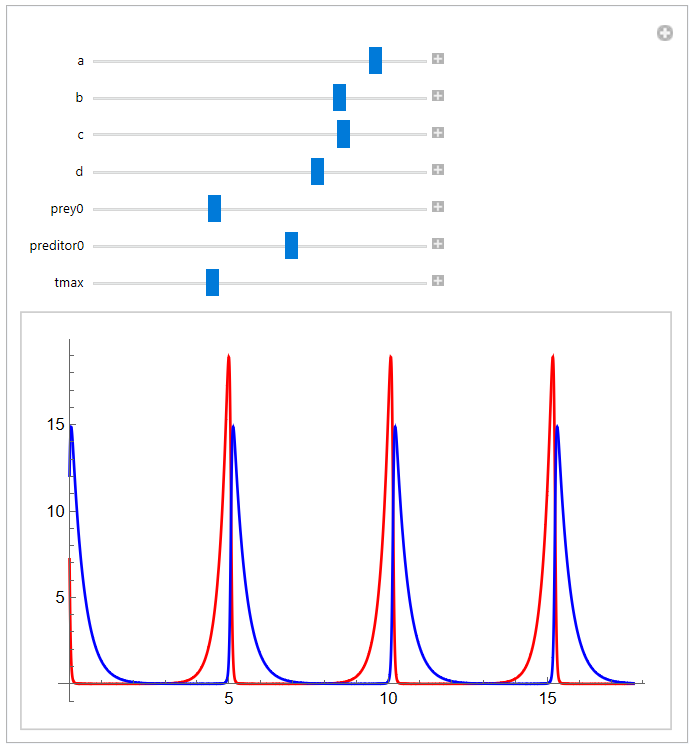
 Attachments:
Attachments:
|


