Hi,
I try SystemModeler to compare with MapleSim and I want to reproduce my model, it's a CNC gantry (PPPRR) for try the realtime simulation.
So I try to drive a prismatics joint by position given by my inverse kinematics, but I not find how to do that, so can you help me?
Here's my MapleSim model: 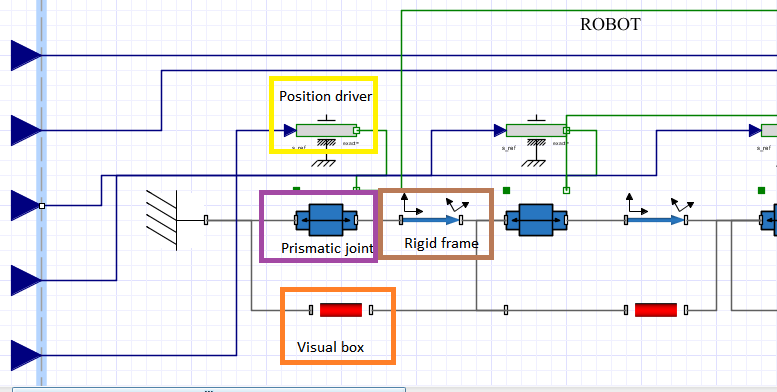
Thanks!


